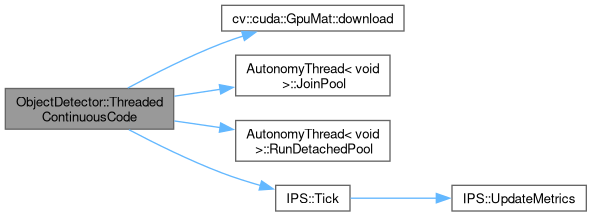
This method will run continuously in a separate thread. New frames from the given camera are grabbed and the objects for the camera image are detected using the PyTorch interpreter. The detected objects are then filtered and stored. Then any requests for the current objects are fulfilled via a call and join of the thread pooled code.
143{
144
145 if (m_bUsingZedCamera)
146 {
147
148 if (!std::dynamic_pointer_cast<ZEDCamera>(m_pCamera)->GetCameraIsOpen())
149 {
150
151 m_bCameraIsOpened = false;
152
153
155 {
156
158
159
160 LOG_CRITICAL(logging::g_qSharedLogger,
161 "ObjectDetector start was attempted for ZED camera with serial number {}, but camera never properly opened or it has been closed/rebooted! "
162 "This object detector will now stop.",
163 std::dynamic_pointer_cast<ZEDCamera>(m_pCamera)->GetCameraSerial());
164 }
165 }
166 else
167 {
168
169 m_bCameraIsOpened = true;
170 }
171 }
172 else
173 {
174
175 if (!std::dynamic_pointer_cast<BasicCamera>(m_pCamera)->GetCameraIsOpen())
176 {
177
178 m_bCameraIsOpened = false;
179
180
182 {
183
185
186
187 LOG_CRITICAL(logging::g_qSharedLogger,
188 "ObjectDetector start was attempted for BasicCam at {}, but camera never properly opened or it has become disconnected!",
189 std::dynamic_pointer_cast<BasicCamera>(m_pCamera)->GetCameraLocation());
190 }
191 }
192 else
193 {
194
195 m_bCameraIsOpened = true;
196 }
197 }
198
199
200 if (m_bCameraIsOpened)
201 {
202
203 std::future<bool> fuPointCloudCopyStatus;
204 std::future<bool> fuRegularFrameCopyStatus;
205
206
207 if (m_bUsingZedCamera)
208 {
209
210 if (m_bUsingGpuMats)
211 {
212
213 fuPointCloudCopyStatus = std::dynamic_pointer_cast<ZEDCamera>(m_pCamera)->RequestPointCloudCopy(m_cvGPUPointCloud);
214
215 fuRegularFrameCopyStatus = std::dynamic_pointer_cast<ZEDCamera>(m_pCamera)->RequestFrameCopy(m_cvGPUFrame);
216
217
218 if (fuPointCloudCopyStatus.get() && fuRegularFrameCopyStatus.get())
219 {
220
221 m_cvGPUPointCloud.
download(m_cvPointCloud);
223
225 }
226 else
227 {
228
229 LOG_WARNING(logging::g_qSharedLogger, "ObjectDetector unable to get point cloud from ZEDCam!");
230 }
231 }
232 else
233 {
234
235 fuPointCloudCopyStatus = std::dynamic_pointer_cast<ZEDCamera>(m_pCamera)->RequestPointCloudCopy(m_cvPointCloud);
236 fuRegularFrameCopyStatus = std::dynamic_pointer_cast<ZEDCamera>(m_pCamera)->RequestFrameCopy(m_cvFrame);
237
238
239 if (!fuPointCloudCopyStatus.get())
240 {
241
242 LOG_WARNING(logging::g_qSharedLogger, "ObjectDetector unable to get point cloud from ZEDCam!");
243 }
244 if (!fuRegularFrameCopyStatus.get())
245 {
246
247 LOG_WARNING(logging::g_qSharedLogger, "ObjectDetector unable to get regular frame from ZEDCam!");
248 }
249 }
250 }
251 else
252 {
253
254 fuRegularFrameCopyStatus = std::dynamic_pointer_cast<BasicCamera>(m_pCamera)->RequestFrameCopy(m_cvFrame);
255
256
257 if (!fuRegularFrameCopyStatus.get())
258 {
259
260 LOG_WARNING(logging::g_qSharedLogger, "ObjectDetector unable to get RGB image from BasicCam!");
261 }
262 }
263
265
267
268 if (m_cvFrame.
empty())
269 {
270
271 LOG_WARNING(logging::g_qSharedLogger, "Frame from camera is empty!");
272 return;
273 }
274
275
276 m_vNewlyDetectedObjects.clear();
277
278 m_cvTorchOverlayFrame = m_cvFrame.
clone();
279 m_cvTorchProcFrame = m_cvFrame.
clone();
280
282
283
284 if (m_bTorchEnabled)
285 {
286
287 std::vector<objectdetectutils::Object> vNewTorchObjects =
288 torchobject::Detect(m_cvTorchProcFrame, *m_pTorchDetector, m_fTorchMinObjectConfidence, m_fTorchNMSThreshold);
289
290 m_vNewlyDetectedObjects.insert(m_vNewlyDetectedObjects.end(), vNewTorchObjects.begin(), vNewTorchObjects.end());
291 }
292
293
295 {
296
297 stObject.dHorizontalFOV = m_pCamera->GetPropHorizontalFOV();
298 }
299
300
302
303
306 }
307
308
309 std::shared_lock<std::shared_mutex> lkSchedulers(m_muPoolScheduleMutex);
310
311 if (!m_qDetectedObjectDrawnOverlayFramesCopySchedule.empty() || !m_qDetectedObjectCopySchedule.empty())
312 {
313 size_t siQueueLength = m_qDetectedObjectDrawnOverlayFramesCopySchedule.size() + m_qDetectedObjectCopySchedule.size();
314
315 this->
RunDetachedPool(siQueueLength, m_nNumDetectedObjectsRetrievalThreads);
316
318
319 lkSchedulers.unlock();
320 }
321}
void RunDetachedPool(const unsigned int nNumTasksToQueue, const unsigned int nNumThreads=2, const bool bForceStopCurrentThreads=false)
When this method is called, it starts a thread pool full of threads that don't return std::futures (l...
Definition AutonomyThread.hpp:336
void JoinPool()
Waits for pool to finish executing tasks. This method will block the calling code until thread is fin...
Definition AutonomyThread.hpp:439
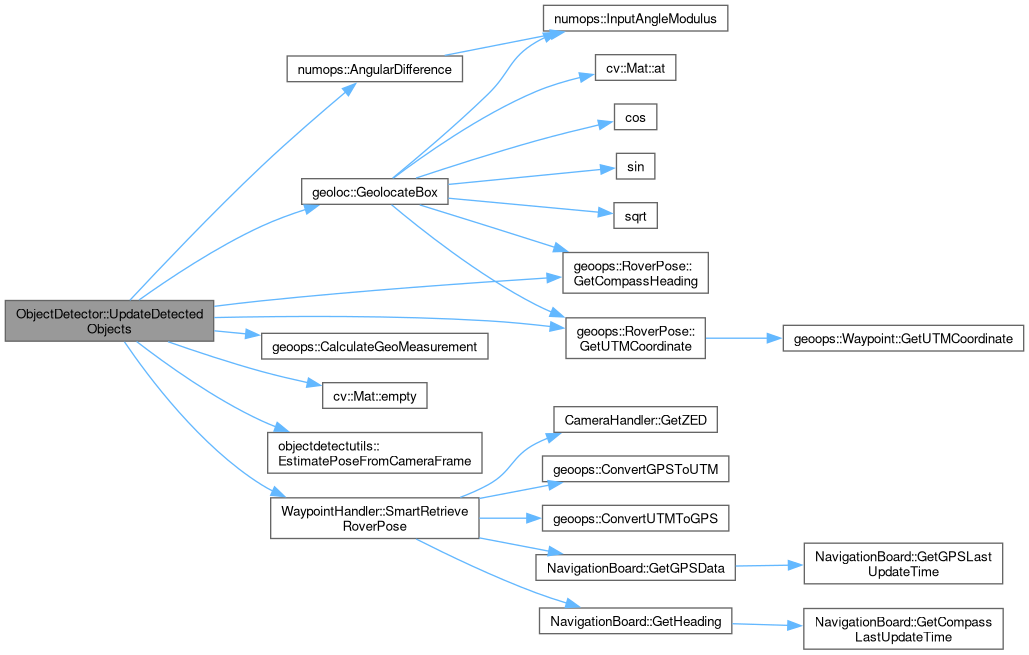
void UpdateDetectedObjects(std::vector< objectdetectutils::Object > &vNewlyDetectedObjects)
Update the detected objects with the newly detected objects.
Definition ObjectDetector.cpp:657
CV_NODISCARD_STD Mat clone() const
void download(OutputArray dst) const
void cvtColor(InputArray src, OutputArray dst, int code, int dstCn=0)
void DrawDetections(cv::Mat &cvDetectionsFrame, const std::vector< objectdetectutils::Object > &vDetectedTags)
Given a vector of objectdetectutils::Object structs draw each tag corner and confidence onto the give...
Definition TorchObjectDetection.hpp:102
std::vector< objectdetectutils::Object > Detect(const cv::Mat &cvFrame, yolomodel::pytorch::PyTorchInterpreter &trPyTorchDetector, const float fMinObjectConfidence=0.40f, const float fNMSThreshold=0.60f)
Detects objects in the given image using a PyTorch model.
Definition TorchObjectDetection.hpp:45
Represents a single detected object. Combines attributes from TorchObject and TensorflowObject struct...
Definition ObjectDetectionUtility.hpp:74
 Public Member Functions inherited from
Public Member Functions inherited from