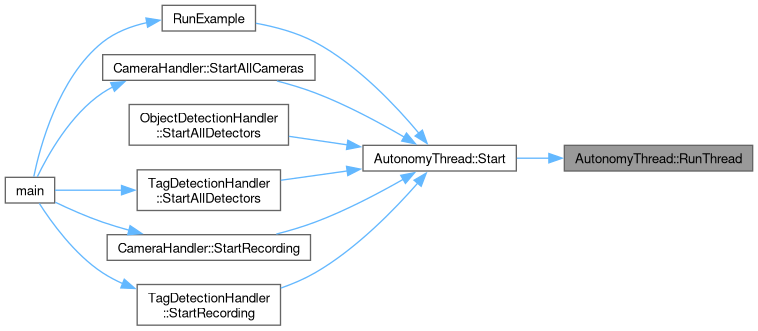
This method is ran in a separate thread. It is a middleware between the class member thread and the user code that handles graceful stopping of user code. This method is intentionally designed to not return anything.
572 {
573
574 std::chrono::_V2::system_clock::time_point tmStartTime;
575
576
577 while (!bStopThread)
578 {
579
580 if (m_nMainThreadMaxIterationPerSecond > 0)
581 {
582
583 tmStartTime = std::chrono::high_resolution_clock::now();
584 }
585
586
587 this->ThreadedContinuousCode();
588
589
590 if (m_nMainThreadMaxIterationPerSecond > 0)
591 {
592
593 std::chrono::_V2::system_clock::time_point tmEndTime = std::chrono::high_resolution_clock::now();
594
595 std::chrono::microseconds tmElapsedTime = std::chrono::duration_cast<std::chrono::microseconds>(tmEndTime - tmStartTime);
596
597 if (tmElapsedTime.count() < (1.0 / m_nMainThreadMaxIterationPerSecond) * 1000000)
598 {
599
600 int nSleepTime = ((1.0 / m_nMainThreadMaxIterationPerSecond) * 1000000) - tmElapsedTime.count();
601
602 std::this_thread::sleep_for(std::chrono::microseconds(nSleepTime));
603 }
604 }
605
606
607 if (m_eThreadState != AutonomyThreadState::eRunning && m_eThreadState != AutonomyThreadState::eStopping)
608 {
609
610 m_eThreadState = AutonomyThreadState::eRunning;
611
612 m_cdThreadRunningCondition.notify_all();
613 }
614
615
617 }
618
619
620 m_cdThreadRunningCondition.notify_all();
621 }
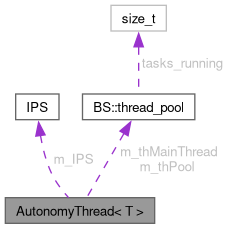
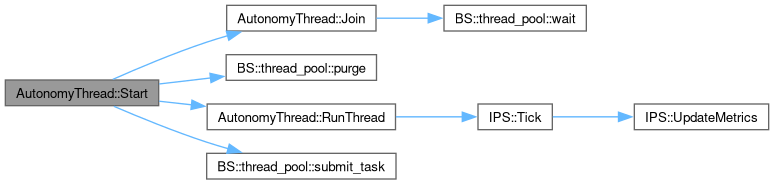
void Tick()
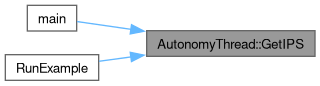
This method is used to update the iterations per second counter and recalculate all of the IPS metric...
Definition IPS.hpp:138