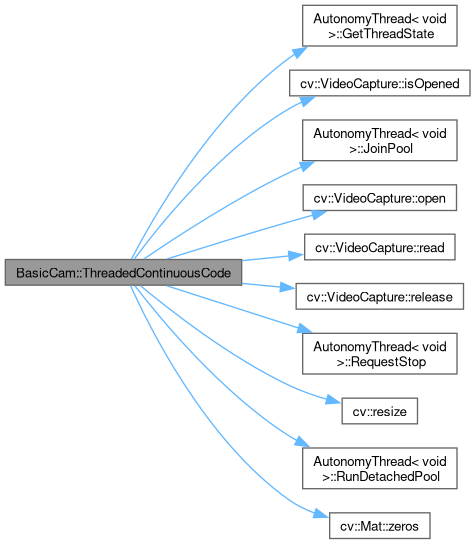
The code inside this private method runs in a separate thread, but still has access to this*. This method continuously get new frames from the OpenCV VideoCapture object and stores it in a member variable. Then a thread pool is started and joined once per iteration to mass copy the frames and/or measure to any other thread waiting in the queues.
184{
185
187 {
188
190 {
191
193
194
195 LOG_CRITICAL(logging::g_qSharedLogger, "Camera start was attempted for BasicCam at {}/{}, but camera was never opened!", m_nCameraIndex, m_szCameraPath);
196 }
197 else
198 {
199
200 bool bCameraReopened = false;
201 std::chrono::time_point tmCurrentTime = std::chrono::system_clock::now();
202
203 int nTimeSinceEpoch = std::chrono::duration_cast<std::chrono::seconds>(tmCurrentTime.time_since_epoch()).count();
204
205
206 if (nTimeSinceEpoch % 5 == 0 && !m_bCameraReopenAlreadyChecked)
207 {
208
209 if (m_nCameraIndex == -1)
210 {
211
212 bCameraReopened = m_cvCamera.
open(m_szCameraPath);
213 }
214 else
215 {
216
217 bCameraReopened = m_cvCamera.
open(m_nCameraIndex);
218 }
219
220
221 if (bCameraReopened)
222 {
223
224 LOG_INFO(logging::g_qSharedLogger, "Camera {}/{} has been reconnected and reopened!", m_nCameraIndex, m_szCameraPath);
225 }
226 else
227 {
228
229 LOG_WARNING(logging::g_qSharedLogger, "Attempt to reopen Camera {}/{} has failed! Trying again in 5 seconds...", m_nCameraIndex, m_szCameraPath);
230
231 }
232
233
234 m_bCameraReopenAlreadyChecked = true;
235 }
236 else if (nTimeSinceEpoch % 5 != 0)
237 {
238
239 m_bCameraReopenAlreadyChecked = false;
240 }
241 }
242 }
243 else
244 {
245
246 if (m_cvCamera.
read(m_cvFrame))
247 {
248
249 cv::resize(m_cvFrame, m_cvFrame,
cv::Size(m_nPropResolutionX, m_nPropResolutionY), 0.0, 0.0, constants::BASICCAM_RESIZE_INTERPOLATION_METHOD);
250 }
251 else
252 {
253
254 LOG_ERROR(logging::g_qSharedLogger, "Unable to read new frame for camera {}, {}! Closing camera...", m_nCameraIndex, m_szCameraPath);
255
257
258
259 m_cvFrame =
cv::Mat::zeros(m_nPropResolutionY, m_nPropResolutionX, CV_8UC3);
260 }
261 }
262
263
264 std::shared_lock<std::shared_mutex> lkSchedulers(m_muPoolScheduleMutex);
265
266 if (!m_qFrameCopySchedule.empty())
267 {
268
269 this->
RunDetachedPool(m_qFrameCopySchedule.size(), m_nNumFrameRetrievalThreads);
270
272
273 lkSchedulers.unlock();
274 }
275}
void RunDetachedPool(const unsigned int nNumTasksToQueue, const unsigned int nNumThreads=2, const bool bForceStopCurrentThreads=false)
When this method is called, it starts a thread pool full of threads that don't return std::futures (l...
Definition AutonomyThread.hpp:336
void JoinPool()
Waits for pool to finish executing tasks. This method will block the calling code until thread is fin...
Definition AutonomyThread.hpp:439
virtual bool read(OutputArray image)
 Public Member Functions inherited from
Public Member Functions inherited from