334 {
335
337
338
339 stConvertCoord.d2DAccuracy = stGPSCoord.d2DAccuracy;
340 stConvertCoord.d3DAccuracy = stGPSCoord.d3DAccuracy;
341 stConvertCoord.dAltitude = stGPSCoord.dAltitude;
342 stConvertCoord.eCoordinateAccuracyFixType = stGPSCoord.eCoordinateAccuracyFixType;
343 stConvertCoord.bIsDifferential = stGPSCoord.bIsDifferential;
344 stConvertCoord.tmTimestamp = stGPSCoord.tmTimestamp;
345
346
347 try
348 {
349
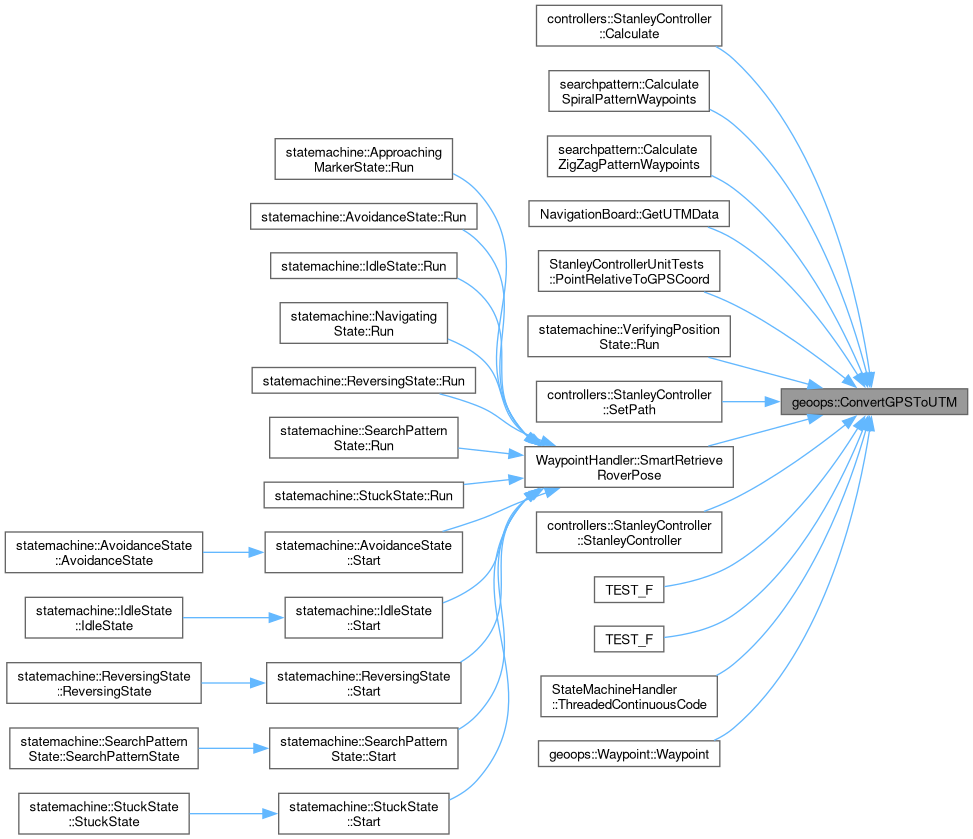
350 GeographicLib::UTMUPS::Forward(stGPSCoord.dLatitude,
351 stGPSCoord.dLongitude,
352 stConvertCoord.nZone,
353 stConvertCoord.bWithinNorthernHemisphere,
354 stConvertCoord.dEasting,
355 stConvertCoord.dNorthing,
356 stConvertCoord.dMeridianConvergence,
357 stConvertCoord.dScale);
358 }
359 catch (const GeographicLib::GeographicErr::exception& geError)
360 {
361
362 LOG_ERROR(logging::g_qSharedLogger, "Unable to forward solve a GPSCoordinate to UTMCoordinate. GeographicLib error is: {}", geError.what());
363 }
364
365
366 return stConvertCoord;
367 }
This struct stores/contains information about a UTM coordinate.
Definition GeospatialOperations.hpp:211