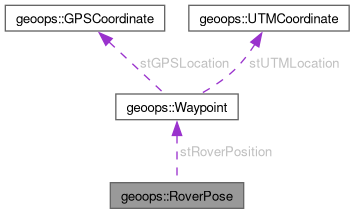
This struct is used by the WaypointHandler to provide an easy way to store all pose data about the rover.
More...
#include <GeospatialOperations.hpp>
|
|
Waypoint | stRoverPosition |
| |
|
double | dRoverHeading |
| |
This struct is used by the WaypointHandler to provide an easy way to store all pose data about the rover.
- Author
- clayjay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2024-04-08
◆ RoverPose() [1/2]
◆ RoverPose() [2/2]
| geoops::RoverPose::RoverPose |
( |
const geoops::UTMCoordinate & |
stRoverPosition, |
|
|
const double |
dRoverHeading = 0.0 |
|
) |
| |
|
inline |
◆ GetGPSCoordinate()
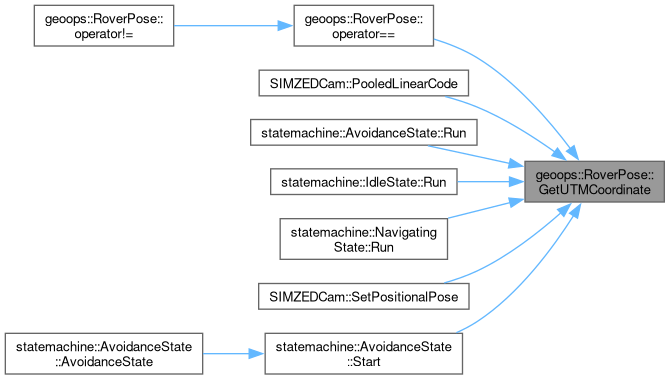
◆ GetUTMCoordinate()
◆ GetWaypoint()
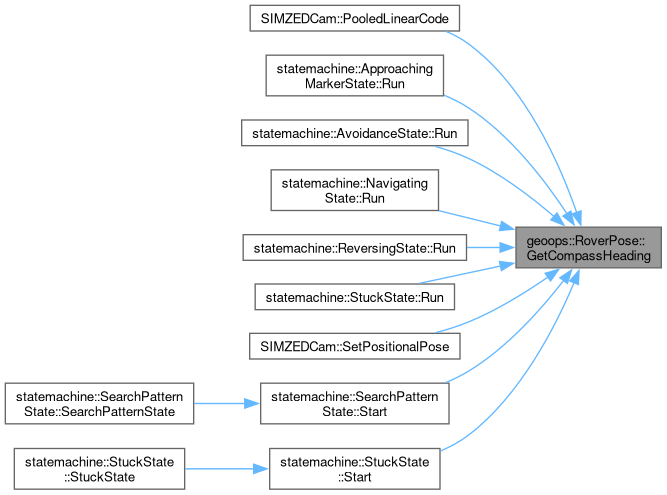
◆ GetCompassHeading()
| double geoops::RoverPose::GetCompassHeading |
( |
| ) |
const |
|
inline |
◆ operator==()
| bool geoops::RoverPose::operator== |
( |
const RoverPose & |
stOtherRoverPose | ) |
const |
|
inline |
Overridden operator equals for RoverPose struct.
- Parameters
-
| stOtherRoverPose | - The other Waypoint struct we are comparing to. |
- Returns
- true - The two RoverPoses are equal.
-
false - The two RoverPoses are not equal.
- Author
- clayjay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2024-04-08
800 {
801
802 return (stRoverPosition == stOtherRoverPose.GetGPSCoordinate() && stRoverPosition == stOtherRoverPose.GetUTMCoordinate() &&
803 dRoverHeading == stOtherRoverPose.dRoverHeading);
804 }
◆ operator!=()
| bool geoops::RoverPose::operator!= |
( |
const RoverPose & |
stOtherRoverPose | ) |
const |
|
inline |
Overridden operator equals for RoverPose struct.
- Parameters
-
| stOtherRoverPose | - The other RoverPose struct we are comparing to. |
- Returns
- true - The two RoverPoses are equal.
-
false - The two RoverPoses are not equal.
- Author
- clayjay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2024-04-08
816{
return !this->
operator==(stOtherRoverPose); }
bool operator==(const RoverPose &stOtherRoverPose) const
Overridden operator equals for RoverPose struct.
Definition GeospatialOperations.hpp:799
The documentation for this struct was generated from the following file: