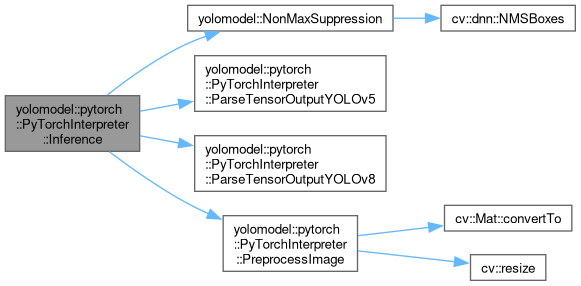
Given an input image forward the image through the YOLO model to run inference on the PyTorch model, then parse and repackage the output tensor data into a vector of easy-to-use Detection structs.
860 {
861
862 torch::set_num_threads(1);
863
864 std::vector<Detection> vObjects;
865
866
867 torch::Tensor trTensorImage =
PreprocessImage(cvInputFrame, m_trDevice);
868
869
870 std::vector<torch::jit::IValue> vInputs;
871 vInputs.push_back(trTensorImage);
872 torch::Tensor trOutputTensor;
873 try
874 {
875 trOutputTensor = m_trModel.forward(vInputs).toTensor();
876 }
877 catch (const c10::Error& trError)
878 {
879 LOG_ERROR(logging::g_qSharedLogger, "Error running inference: {}", trError.what());
880 return vObjects;
881 }
882
883
884 int nImgSize = m_cvModelInputSize.
height;
885 int nP3Stride = std::pow((nImgSize / 8), 2);
886 int nP4Stride = std::pow((nImgSize / 16), 2);
887 int nP5Stride = std::pow((nImgSize / 32), 2);
888
889 int nYOLOv5AnchorsPerGridPoint = 3;
890 int nYOLOv8AnchorsPerGridPoint = 1;
891 int nYOLOv5TotalPredictionLength =
892 (nP3Stride * nYOLOv5AnchorsPerGridPoint) + (nP4Stride * nYOLOv5AnchorsPerGridPoint) + (nP5Stride * nYOLOv5AnchorsPerGridPoint);
893 int nYOLOv8TotalPredictionLength =
894 (nP3Stride * nYOLOv8AnchorsPerGridPoint) + (nP4Stride * nYOLOv8AnchorsPerGridPoint) + (nP5Stride * nYOLOv8AnchorsPerGridPoint);
895
896
897 std::vector<int> vClassIDs;
898 std::vector<std::string> vClassLabels;
899 std::vector<float> vClassConfidences;
900 std::vector<cv::Rect> vBoundingBoxes;
901
902
903 int nLargestDimension = *std::max_element(trOutputTensor.sizes().begin(), trOutputTensor.sizes().end());
904
905 if (nLargestDimension == nYOLOv5TotalPredictionLength)
906 {
907
908 this->
ParseTensorOutputYOLOv5(trOutputTensor, vClassIDs, vClassConfidences, vBoundingBoxes, cvInputFrame.
size(), fMinObjectConfidence);
909 }
910
911 else if (nLargestDimension == nYOLOv8TotalPredictionLength)
912 {
913
914 this->
ParseTensorOutputYOLOv8(trOutputTensor, vClassIDs, vClassConfidences, vBoundingBoxes, cvInputFrame.
size(), fMinObjectConfidence);
915 }
916
917
918 NonMaxSuppression(vObjects, vClassIDs, vClassConfidences, vBoundingBoxes, fMinObjectConfidence, fNMSThreshold);
919
920
921 for (size_t nIter = 0; nIter < vObjects.size(); ++nIter)
922 {
923
924 if (vClassIDs[nIter] >= 0 && vClassIDs[nIter] < static_cast<int>(m_vClassLabels.size()))
925 {
926 vObjects[nIter].szClassName = m_vClassLabels[vClassIDs[nIter]];
927 }
928 else
929 {
930 vObjects[nIter].szClassName = "UnknownClass";
931 }
932 }
933
934 return vObjects;
935 }
void ParseTensorOutputYOLOv8(const torch::Tensor &trOutput, std::vector< int > &vClassIDs, std::vector< float > &vClassConfidences, std::vector< cv::Rect > &vBoundingBoxes, const cv::Size &cvInputFrameSize, const float fMinObjectConfidence)
Given a tensor output from a YOLOv5 model, parse it's output into something more usable.
Definition YOLOModel.hpp:1101
void ParseTensorOutputYOLOv5(const torch::Tensor &trOutput, std::vector< int > &vClassIDs, std::vector< float > &vClassConfidences, std::vector< cv::Rect > &vBoundingBoxes, const cv::Size &cvInputFrameSize, const float fMinObjectConfidence)
Given a tensor output from a YOLOv5 model, parse it's output into something more usable.
Definition YOLOModel.hpp:993
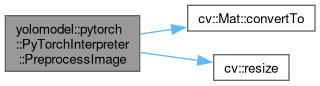
torch::Tensor PreprocessImage(const cv::Mat &cvInputFrame, const torch::Device &trDevice)
Given an input image, preprocess the image to match the input tensor shape of the model,...
Definition YOLOModel.hpp:964
void NonMaxSuppression(std::vector< Detection > &vObjects, std::vector< int > &vClassIDs, std::vector< float > &vClassConfidences, std::vector< cv::Rect > &vBoundingBoxes, float fMinObjectConfidence, float fNMSThreshold)
Perform non max suppression for the given predictions. This eliminates/combines predictions that over...
Definition YOLOModel.hpp:71