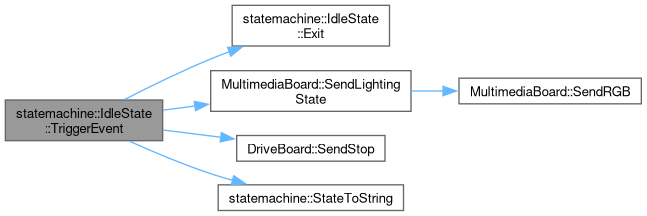
Trigger an event in the state machine. Returns the next state.
112 {
113
114 States eNextState = States::eIdle;
115 bool bCompleteStateExit = true;
116
117 switch (eEvent)
118 {
119 case Event::eStart:
120 {
121
122 LOG_INFO(logging::g_qSharedLogger, "IdleState: Handling Start event.");
123
124 globals::g_pMultimediaBoard->
SendLightingState(MultimediaBoard::MultimediaBoardLightingState::eAutonomy);
125
126 bool tagInSight = false;
127 bool reverseAlways = false;
128
129
130 if (tagInSight)
131 {
132 LOG_INFO(logging::g_qSharedLogger, "IdleState: Detected ArUco marker. Transitioning to Reverse State.");
133 eNextState = States::eReversing;
134 }
135
136 else if (reverseAlways)
137 {
138 LOG_INFO(logging::g_qSharedLogger, "IdleState: Reverse always flag set. Transitioning to Reverse State.");
139 eNextState = States::eReversing;
140 }
141
142 else
143 {
144
145 if (globals::g_pWaypointHandler->GetWaypointCount() > 0)
146 {
147
148 LOG_INFO(logging::g_qSharedLogger, "IdleState: No ArUco marker detected. Transitioning to Navigating State.");
149
150 eNextState = States::eNavigating;
151 }
152 else
153 {
154
155 LOG_NOTICE(logging::g_qSharedLogger,
156 "IdleState: Not transitioning to NavigatingState because no waypoints have been added to the waypoint handler!");
157 }
158 }
159
160 break;
161 }
162 case Event::eAbort:
163 {
164
165 LOG_INFO(logging::g_qSharedLogger, "IdleState: Handling Abort event.");
166
167 globals::g_pMultimediaBoard->
SendLightingState(MultimediaBoard::MultimediaBoardLightingState::eOff);
168
170 break;
171 }
172 default:
173 {
174
175 LOG_WARNING(logging::g_qSharedLogger, "IdleState: Handling unknown event.");
176 break;
177 }
178 }
179
180 if (eNextState != States::eIdle)
181 {
182 LOG_INFO(logging::g_qSharedLogger,
"IdleState: Transitioning to {} State.",
StateToString(eNextState));
183
184
185 if (bCompleteStateExit)
186 {
188 }
189 }
190
191 return eNextState;
192 }
void Exit() override
This method is called when the state is exited. It is used to clean up the state.
Definition IdleState.cpp:48
std::string StateToString(States eState)
Converts a state object to a string.
Definition State.hpp:85
States
The states that the state machine can be in.
Definition State.hpp:31
 Public Member Functions inherited from
Public Member Functions inherited from