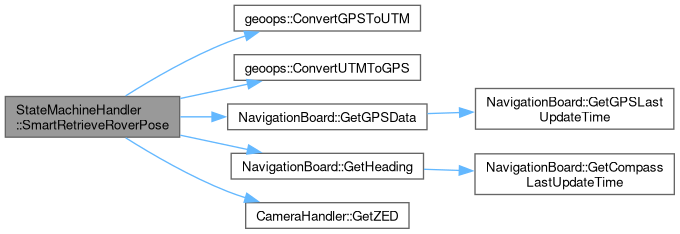
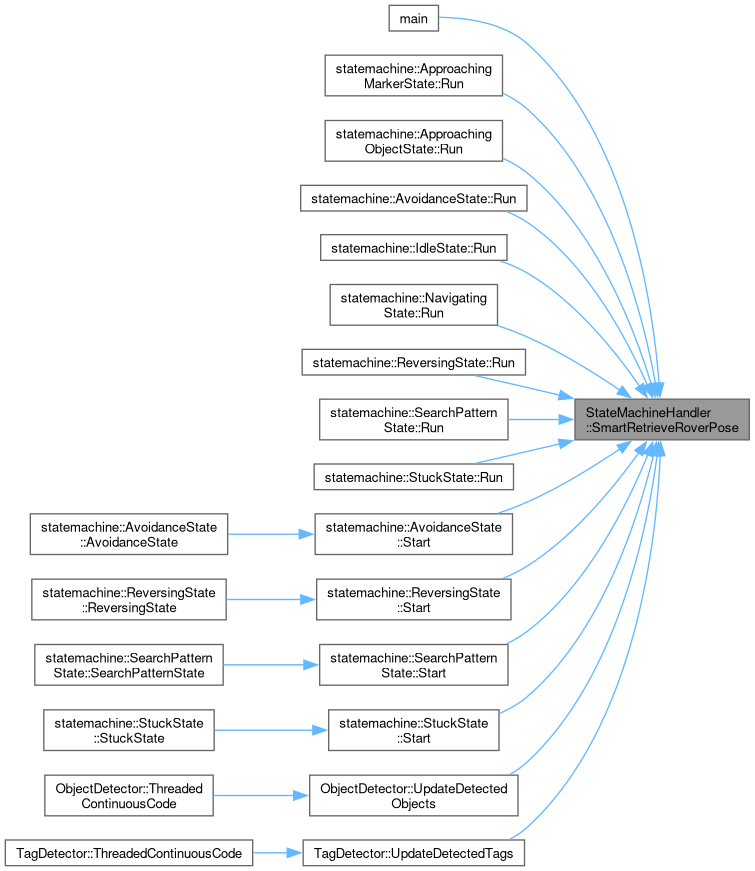
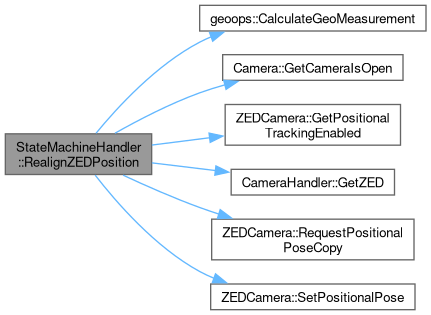
Retrieve the rover's current position and heading. Automatically picks between getting the position/heading from the NavBoard, ZEDSDK Fusion module, or ZED positional tracking. In most cases, this will be the method that should be called over getting the data directly from NavBoard.
446{
447
449 double dCurrentGPSHeading = globals::g_pNavigationBoard->
GetHeading();
450
451
452 std::shared_ptr<ZEDCamera> pMainCam = globals::g_pCameraHandler->
GetZED(CameraHandler::ZEDCamName::eHeadMainCam);
454 double dCurrentHeading = dCurrentGPSHeading;
455 bool bVIOGPSFused = false;
456 static bool bAlreadyPrinted = false;
457
458 if ((bVIOHeading || bVIOTracking) && !constants::MODE_SIM)
459 {
460
461 if (pMainCam->GetCameraIsOpen() && pMainCam->GetPositionalTrackingEnabled())
462 {
463
464 sl::GNSS_FUSION_STATUS slGNSSFusionStatus = pMainCam->GetFusedPositionalTrackingState().gnss_fusion_status;
465
466
467 if (constants::FUSION_ENABLE_GNSS_FUSION && pMainCam->GetIsFusionMaster() && stCurrentGPSPosition.bIsDifferential &&
468 (slGNSSFusionStatus == sl::GNSS_FUSION_STATUS::OK || slGNSSFusionStatus == sl::GNSS_FUSION_STATUS::RECALIBRATION_IN_PROGRESS))
469 {
470
471 sl::GeoPose slCurrentCameraGeoPose;
473
474
475 if (bVIOTracking)
476 {
477
478 std::future<bool> fuResultStatus = pMainCam->RequestFusionGeoPoseCopy(slCurrentCameraGeoPose);
479 if (fuResultStatus.get())
480 {
481
482 stCurrentVIOPosition.dLatitude = slCurrentCameraGeoPose.latlng_coordinates.getLatitude(false);
483 stCurrentVIOPosition.dLongitude = slCurrentCameraGeoPose.latlng_coordinates.getLongitude(false);
484 stCurrentVIOPosition.dAltitude = slCurrentCameraGeoPose.latlng_coordinates.getAltitude();
485
486
487 bVIOGPSFused = true;
488 }
489 }
490
491
492 if (bVIOHeading)
493 {
494
495 std::future<bool> fuResultStatus2 = pMainCam->RequestPositionalPoseCopy(stCurrentCameraVIOPose);
496 if (fuResultStatus2.get())
497 {
498
499 dCurrentHeading = stCurrentCameraVIOPose.stEulerAngles.dYO;
500
501
502 bVIOGPSFused = true;
503 }
504 }
505
506
507 if (bAlreadyPrinted)
508 {
509
510 LOG_NOTICE(logging::g_qSharedLogger, "GNSS Fusion has now converged! Using GNSS Fusion for rover pose...");
511
512 bAlreadyPrinted = false;
513 }
514 }
515 else
516 {
517
519
520
521 std::future<bool> fuResultStatus = pMainCam->RequestPositionalPoseCopy(stCurrentCameraVIOPose);
522
523 if (fuResultStatus.get())
524 {
525
526 if (bVIOTracking)
527 {
528
530
531 stCameraUTMLocation.dEasting = stCurrentCameraVIOPose.stTranslation.dX;
532 stCameraUTMLocation.dNorthing = stCurrentCameraVIOPose.stTranslation.dZ;
533 stCameraUTMLocation.dAltitude = stCurrentCameraVIOPose.stTranslation.dY;
534
536 }
537
538
539 if (bVIOHeading)
540 {
541
542 dCurrentHeading = stCurrentCameraVIOPose.stEulerAngles.dYO;
543 }
544
545
546 bVIOGPSFused = false;
547 }
548
549
550 if (!bAlreadyPrinted && constants::FUSION_ENABLE_GNSS_FUSION)
551 {
552
553 LOG_NOTICE(logging::g_qSharedLogger, "GNSS Fusion is still calibrating. Using VIO tracking for rover pose...");
554
555 bAlreadyPrinted = true;
556 }
557 }
558 }
559 else
560 {
561 LOG_WARNING_LIMIT(std::chrono::seconds(5),
562 logging::g_qSharedLogger,
563 "Positional tracking is NOT ENABLED, NOT STABLE, or camera is NOT OPEN! Using NavBoard GPS data for rover pose...");
564 }
565 }
566
567
569 LOG_DEBUG(logging::g_qSharedLogger,
570 "Rover Pose is currently: {} (easting), {} (northing), {} (alt), {} (degrees), GNSS/VIO FUSED? = {}, VIOPosition = {}, VIOHeading = {}",
571 stCurrentUTMPosition.dEasting,
572 stCurrentUTMPosition.dNorthing,
573 stCurrentUTMPosition.dAltitude,
574 dCurrentHeading,
575 bVIOGPSFused ? "true" : "false",
576 bVIOTracking ? "true" : "false",
577 bVIOHeading ? "true" : "false");
578
579
580 if (bVIOHeading || bVIOTracking)
581 {
582
583 double dHeadingError = dCurrentHeading - dCurrentGPSHeading;
584 double dEastingError =
ConvertGPSToUTM(stCurrentGPSPosition).dEasting - stCurrentUTMPosition.dEasting;
585 double dNorthingError =
ConvertGPSToUTM(stCurrentGPSPosition).dNorthing - stCurrentUTMPosition.dNorthing;
586
587
588 std::string szErrorMetrics = "--------[ Pose Tracking Error ]--------\nGPS/VIO Position Error (UTM for easy reading):\n" +
589 std::to_string(
ConvertGPSToUTM(stCurrentGPSPosition).dEasting) +
" (NavBoard) vs. " + std::to_string(stCurrentUTMPosition.dEasting) +
590 " (Camera) = " + std::to_string(dEastingError) +
" (error)\n" + std::to_string(
ConvertGPSToUTM(stCurrentGPSPosition).dNorthing) +
591 " (NavBoard) vs. " + std::to_string(stCurrentUTMPosition.dNorthing) + " (Camera) = " + std::to_string(dNorthingError) +
592 " (error)\n" + "Heading Error:\n" + std::to_string(dCurrentGPSHeading) + " (NavBoard) vs. " + std::to_string(dCurrentHeading) +
593 " (Camera) = " + std::to_string(dHeadingError) + " (error)\n GNSS/VIO FUSED? = " + (bVIOGPSFused ? "true" : "false") +
594 ", VIOPosition = " + (bVIOTracking ? "true" : "false") + ", VIOHeading = " + (bVIOHeading ? "true" : "false");
595
596 LOG_DEBUG(logging::g_qSharedLogger, "{}", szErrorMetrics);
597 }
598
600}
GPSCoordinate ConvertUTMToGPS(const UTMCoordinate &stUTMCoord)
Given a UTM coordinate, convert to GPS and create a new GPSCoordinate object.
Definition GeospatialOperations.hpp:378
This struct is used within the ZEDCam class to store the camera pose with high precision....
Definition ZEDCamera.hpp:77
This struct is used by the WaypointHandler to provide an easy way to store all pose data about the ro...
Definition GeospatialOperations.hpp:708
This struct stores/contains information about a UTM coordinate.
Definition GeospatialOperations.hpp:211
 Private Member Functions inherited from
Private Member Functions inherited from