Sets the left and right drive powers of the drive board.
119{
120
121 if (bEnableVariableDriveEffort)
122 {
125 }
126
127
128 double dLeftInput = std::clamp(stDrivePowers.dLeftDrivePower, -1.0, 1.0);
129 double dRightInput = std::clamp(stDrivePowers.dRightDrivePower, -1.0, 1.0);
130
131
132
133
134
135 double dLinearPower = (dLeftInput + dRightInput) / 2.0;
136 double dAngularPower = (dLeftInput - dRightInput) / 2.0;
137
138
139
140
141 {
142 std::shared_lock<std::shared_mutex> lkDriveEffortLock(m_muDriveEffortMutex);
143 dLinearPower *= m_fDriveEffortMultiplier;
144 }
145
146
147 double dLeftSpeed = dLinearPower + dAngularPower;
148 double dRightSpeed = dLinearPower - dAngularPower;
149
150
151
152
153 double dMaxMagnitude = std::max(std::abs(dLeftSpeed), std::abs(dRightSpeed));
154 if (dMaxMagnitude > 1.0)
155 {
156 dLeftSpeed /= dMaxMagnitude;
157 dRightSpeed /= dMaxMagnitude;
158 }
159
160
161
162 if (m_fMinDriveEffort != 0.0 || m_fMaxDriveEffort != 0.0)
163 {
164
165 m_stDrivePowers.dLeftDrivePower = std::clamp(float(dLeftSpeed), m_fMinDriveEffort, m_fMaxDriveEffort);
166 m_stDrivePowers.dRightDrivePower = std::clamp(float(dRightSpeed), m_fMinDriveEffort, m_fMaxDriveEffort);
167 }
168
169
170 rovecomm::RoveCommPacket<float> stPacket;
171 stPacket.unDataId = manifest::Core::COMMANDS.find("DRIVELEFTRIGHT")->second.DATA_ID;
172 stPacket.unDataCount = manifest::Core::COMMANDS.find("DRIVELEFTRIGHT")->second.DATA_COUNT;
173 stPacket.eDataType = manifest::Core::COMMANDS.find("DRIVELEFTRIGHT")->second.DATA_TYPE;
174 stPacket.vData.emplace_back(m_stDrivePowers.dLeftDrivePower);
175 stPacket.vData.emplace_back(m_stDrivePowers.dRightDrivePower);
176
177 if (network::g_pRoveCommUDPNode)
178 {
179
180 const char* cIPAddress = constants::MODE_SIM ? constants::SIM_IP_ADDRESS.c_str() : manifest::Core::IP_ADDRESS.IP_STR.c_str();
181
182 network::g_pRoveCommUDPNode->SendUDPPacket(stPacket, cIPAddress, constants::ROVECOMM_OUTGOING_UDP_PORT);
183 }
184
185 LOG_DEBUG(logging::g_qSharedLogger, "Driving at: ({}, {})", m_stDrivePowers.dLeftDrivePower, m_stDrivePowers.dRightDrivePower);
186}
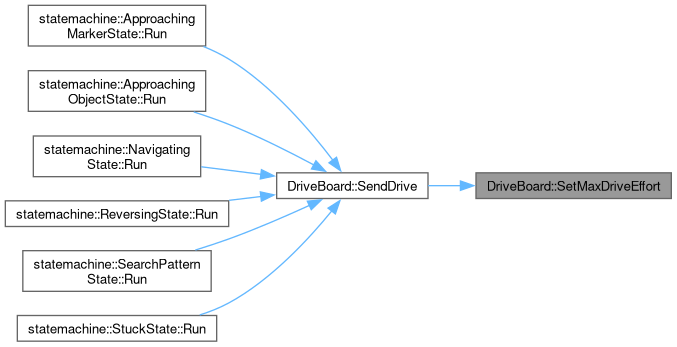
void SetMaxDriveEffort(const float fMaxDriveEffortMultiplier)
Set the max power limits of the drive.
Definition DriveBoard.cpp:277
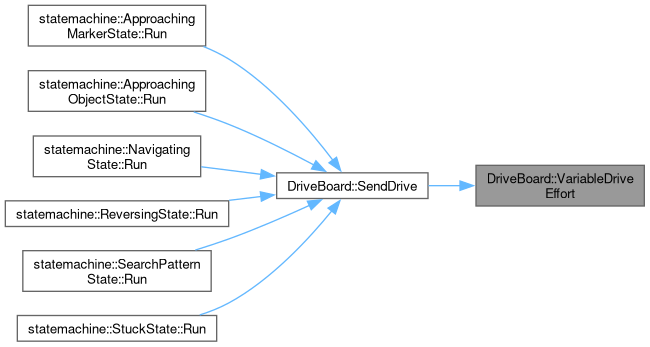
float VariableDriveEffort()
This method calculates a multiplier that is applied to SetMaxDriveEffort() to adjust the speed of the...
Definition DriveBoard.cpp:229