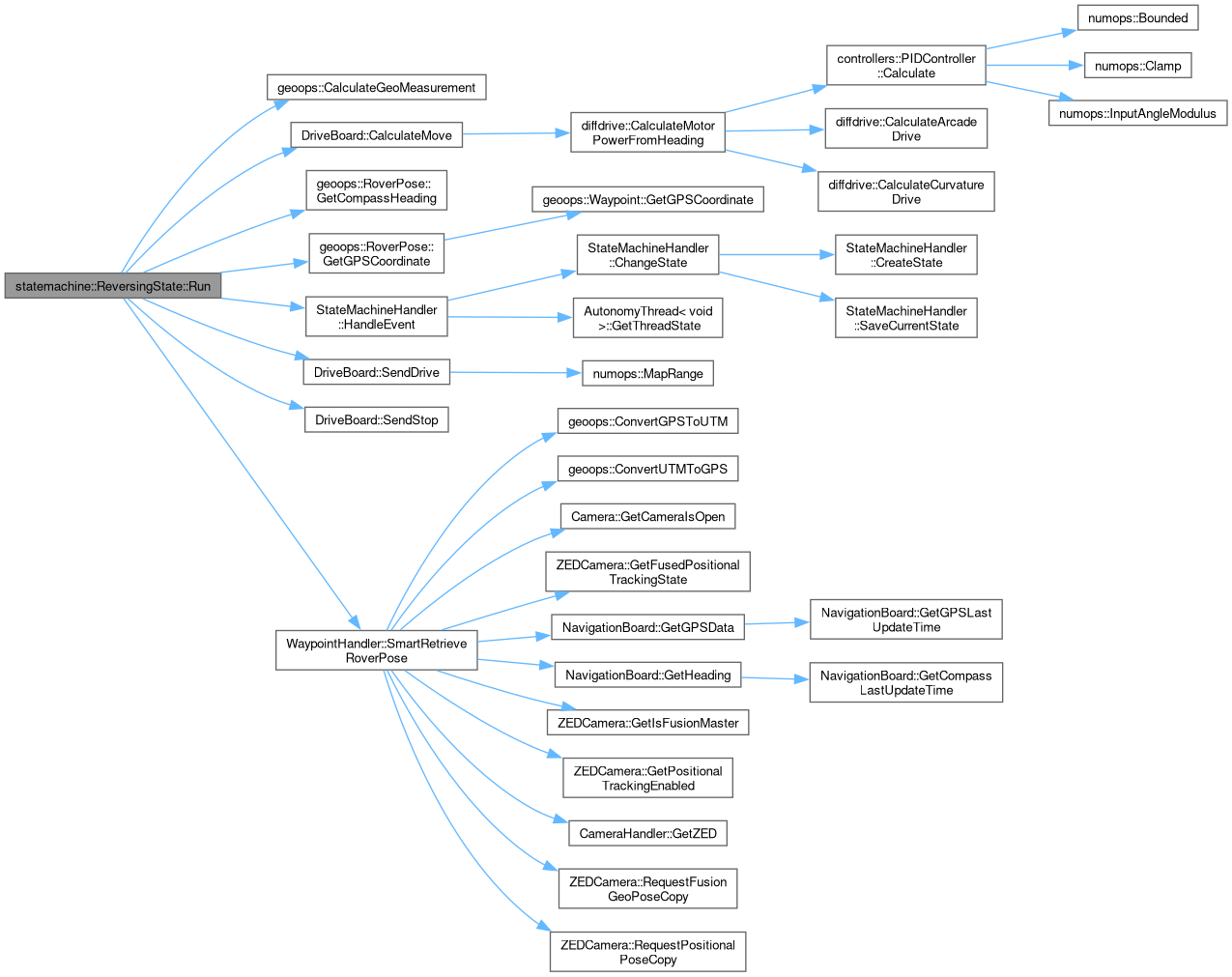
Run the state machine. Returns the next state.
86 {
87
88 LOG_DEBUG(logging::g_qSharedLogger, "ReversingState: Running state-specific behavior.");
89
90
91 static bool bTimeSinceLastMeterAlreadySet = false;
92
93
95
96 std::chrono::system_clock::time_point tmCurrentTime = std::chrono::high_resolution_clock::now();
97
99
100
101 double dTotalTimeElapsed = std::chrono::duration_cast<std::chrono::seconds>(tmCurrentTime - m_tmStartReversingTime).count();
102 double dTimeElapsedSinceLastMeter = std::chrono::duration_cast<std::chrono::milliseconds>(tmCurrentTime - m_tmTimeSinceLastMeter).count() / 1000.0;
103
104 if (stMeasurement.dDistanceMeters >= constants::REVERSE_DISTANCE)
105 {
106
107 LOG_NOTICE(logging::g_qSharedLogger, "ReversingState: Successfully reversed {} meters in {} seconds.", stMeasurement.dDistanceMeters, dTotalTimeElapsed);
108
110
111 globals::g_pStateMachineHandler->
HandleEvent(Event::eReverseComplete);
112
113 return;
114 }
115
116 else if (dTimeElapsedSinceLastMeter >= constants::REVERSE_TIMEOUT_PER_METER)
117 {
118
119 LOG_NOTICE(logging::g_qSharedLogger,
120 "ReversingState: Reversed {} meters in {} seconds before timeout was reached. Goal was {} meters, so rover must be running into something...",
121 stMeasurement.dDistanceMeters,
122 dTotalTimeElapsed,
123 constants::REVERSE_DISTANCE);
124
126
127 globals::g_pStateMachineHandler->
HandleEvent(Event::eStuck);
128
129 return;
130 }
131
132 else if (int(stMeasurement.dDistanceMeters) % 2 == 0 && !bTimeSinceLastMeterAlreadySet)
133 {
134
135 m_tmTimeSinceLastMeter = std::chrono::high_resolution_clock::now();
136
137 bTimeSinceLastMeterAlreadySet = true;
138 }
139 else if (int(stMeasurement.dDistanceMeters) % 2 != 0 && bTimeSinceLastMeterAlreadySet)
140 {
141
142 bTimeSinceLastMeterAlreadySet = false;
143 }
144
145
146 if (constants::REVERSE_MAINTAIN_HEADING)
147 {
148
152 diffdrive::DifferentialControlMethod::eArcadeDrive);
153
154 globals::g_pDriveBoard->
SendDrive(stReverse);
155 }
156 else
157 {
158
159 diffdrive::DrivePowers stMotorPowers{-std::fabs(constants::REVERSE_MOTOR_POWER), -std::fabs(constants::REVERSE_MOTOR_POWER)};
160
161 globals::g_pDriveBoard->
SendDrive(stMotorPowers);
162 }
163 }
void SendDrive(const diffdrive::DrivePowers &stDrivePowers, const bool bEnableVariableDriveEffort=true)
Sets the left and right drive powers of the drive board.
Definition DriveBoard.cpp:118
void SendStop()
Stop the drivetrain of the Rover.
Definition DriveBoard.cpp:195
diffdrive::DrivePowers CalculateMove(const double dGoalSpeed, const double dGoalHeading, const double dActualHeading, const diffdrive::DifferentialControlMethod eKinematicsMethod=diffdrive::DifferentialControlMethod::eArcadeDrive, const bool bAlwaysProgressForward=false)
This method determines drive powers to make the Rover drive towards a given heading at a given speed.
Definition DriveBoard.cpp:88
void HandleEvent(statemachine::Event eEvent, const bool bSaveCurrentState=false)
This method Handles Events that are passed to the State Machine Handler. It will check the current st...
Definition StateMachineHandler.cpp:353
GeoMeasurement CalculateGeoMeasurement(const GPSCoordinate &stCoord1, const GPSCoordinate &stCoord2)
The shortest path between two points on an ellipsoid at (lat1, lon1) and (lat2, lon2) is called the g...
Definition GeospatialOperations.hpp:553
This struct is used to store the left and right drive powers for the robot. Storing these values in a...
Definition DifferentialDrive.hpp:73
This struct is used to store the distance, arc length, and relative bearing for a calculated geodesic...
Definition GeospatialOperations.hpp:83
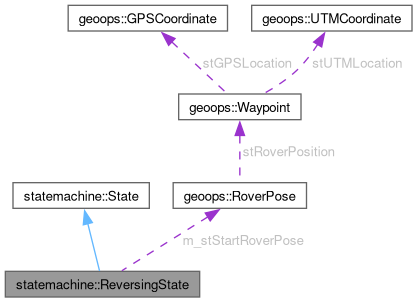
This struct is used by the WaypointHandler to provide an easy way to store all pose data about the ro...
Definition GeospatialOperations.hpp:708
const geoops::GPSCoordinate & GetGPSCoordinate() const
Accessor for the geoops::GPSCoordinate member variable.
Definition GeospatialOperations.hpp:756
double GetCompassHeading() const
Accessor for the Compass Heading private member.
Definition GeospatialOperations.hpp:787
 Public Member Functions inherited from
Public Member Functions inherited from