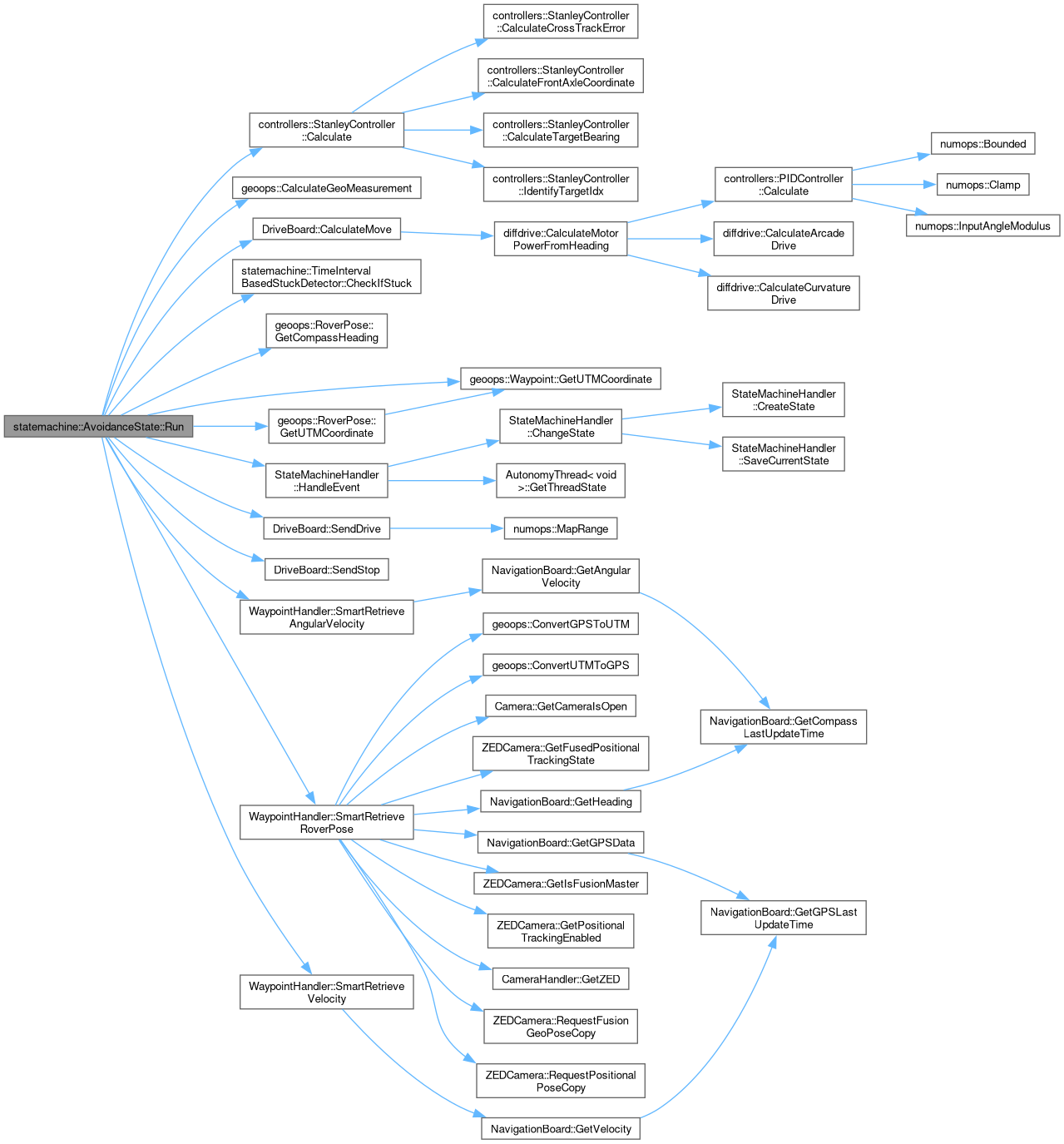
Run the state machine. Returns the next state.
116 {
117 LOG_DEBUG(logging::g_qSharedLogger, "AvoidanceState: Running state-specific behavior.");
118
119
120
121
122
123
124
127
128
129 if (m_stStuckChecker.
CheckIfStuck(globals::g_pWaypointHandler->SmartRetrieveVelocity(), globals::g_pWaypointHandler->SmartRetrieveAngularVelocity()))
130 {
131 LOG_INFO(logging::g_qSharedLogger, "AvoidanceState: Rover has become stuck");
132 globals::g_pStateMachineHandler->
HandleEvent(Event::eStuck,
true);
133 }
134
135
136 else if (stGoalWaypointMeasurement.dDistanceMeters > constants::NAVIGATING_REACHED_GOAL_RADIUS)
137 {
138
139
140
141
142
144
146 stDriveVector.dThetaHeading,
148 diffdrive::DifferentialControlMethod::eArcadeDrive);
149
150
151 globals::g_pDriveBoard->
SendDrive(stDriveSpeeds);
152 }
153
154
155 else
156 {
158 globals::g_pStateMachineHandler->
HandleEvent(Event::eEndObstacleAvoidance,
false);
159 }
160 }
void SendDrive(const diffdrive::DrivePowers &stDrivePowers)
Sets the left and right drive powers of the drive board.
Definition DriveBoard.cpp:117
void SendStop()
Stop the drivetrain of the Rover.
Definition DriveBoard.cpp:163
diffdrive::DrivePowers CalculateMove(const double dGoalSpeed, const double dGoalHeading, const double dActualHeading, const diffdrive::DifferentialControlMethod eKinematicsMethod=diffdrive::DifferentialControlMethod::eArcadeDrive, const bool bAlwaysProgressForward=false)
This method determines drive powers to make the Rover drive towards a given heading at a given speed.
Definition DriveBoard.cpp:87
DriveVector Calculate(const geoops::RoverPose &stCurrentPose, const double dMaxSpeed=constants::NAVIGATING_MOTOR_POWER)
Calculate an updated steering angle for the rover based on the current pose using the predictive stan...
Definition PredictiveStanleyController.cpp:100
bool CheckIfStuck(double dCurrentVelocity, double dCurrentAngularVelocity)
Checks if the rover meets stuck criteria based in the given parameters.
Definition StuckDetection.hpp:105
GeoMeasurement CalculateGeoMeasurement(const GPSCoordinate &stCoord1, const GPSCoordinate &stCoord2)
The shortest path between two points on an ellipsoid at (lat1, lon1) and (lat2, lon2) is called the g...
Definition GeospatialOperations.hpp:522
Definition PredictiveStanleyController.h:50
This struct is used to store the left and right drive powers for the robot. Storing these values in a...
Definition DifferentialDrive.hpp:73
This struct is used to store the distance, arc length, and relative bearing for a calculated geodesic...
Definition GeospatialOperations.hpp:82
This struct is used by the WaypointHandler to provide an easy way to store all pose data about the ro...
Definition GeospatialOperations.hpp:677
double GetCompassHeading() const
Accessor for the Compass Heading private member.
Definition GeospatialOperations.hpp:756
 Public Member Functions inherited from
Public Member Functions inherited from