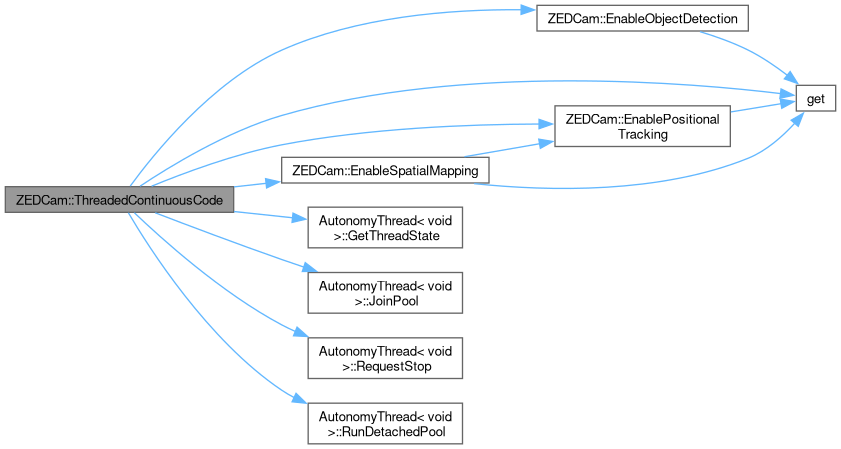
The code inside this private method runs in a separate thread, but still has access to this*. This method continuously calls the grab() function of the ZEDSDK, which updates all frames (RGB, depth, cloud) and all other data such as positional and spatial mapping. Then a thread pool is started and joined once per iteration to mass copy the frames and/or measure to any other thread waiting in the queues.
290{
291
292 std::shared_lock<std::shared_mutex> lkReadCameraLock(m_muCameraMutex);
293
294 if (!m_slCamera.isOpened())
295 {
296
297 lkReadCameraLock.unlock();
298
299
301 {
302
304
305 LOG_CRITICAL(logging::g_qSharedLogger,
306 "Camera start was attempted for ZED camera with serial number {}, but camera never properly opened or it has been closed/rebooted!",
307 m_unCameraSerialNumber);
308 }
309 else
310 {
311 std::chrono::time_point tmCurrentTime = std::chrono::system_clock::now();
312
313 int nTimeSinceEpoch = std::chrono::duration_cast<std::chrono::seconds>(tmCurrentTime.time_since_epoch()).count();
314
315
316 if (nTimeSinceEpoch % 5 == 0 && !m_bCameraReopenAlreadyChecked)
317 {
318
319 std::unique_lock<std::shared_mutex> lkWriteCameraLock(m_muCameraMutex);
320
321 sl::ERROR_CODE slReturnCode = m_slCamera.open(m_slCameraParams);
322
323 lkWriteCameraLock.unlock();
324
325
326 if (slReturnCode == sl::ERROR_CODE::SUCCESS)
327 {
328
329 LOG_INFO(logging::g_qSharedLogger, "ZED stereo camera with serial number {} has been reconnected and reopened!", m_unCameraSerialNumber);
330
331
332 if (m_bCameraIsFusionMaster)
333 {
334
335 std::unique_lock<std::shared_mutex> lkWriteCameraLock(m_muCameraMutex);
336
337 m_slCamera.startPublishing();
338
339 lkWriteCameraLock.unlock();
340 }
341
342
343 if (!m_slCamera.isPositionalTrackingEnabled())
344 {
346 }
347 else
348 {
349
350 LOG_ERROR(logging::g_qSharedLogger,
351 "After reopening ZED stereo camera with serial number {}, positional tracking failed to reinitialize. sl::ERROR_CODE is: {}",
352 m_unCameraSerialNumber,
353 sl::toString(slReturnCode).
get());
354 }
355
356 if (m_slCamera.getSpatialMappingState() != sl::SPATIAL_MAPPING_STATE::OK)
357 {
359 }
360 else
361 {
362
363 LOG_ERROR(logging::g_qSharedLogger,
364 "After reopening ZED stereo camera with serial number {}, spatial mapping failed to reinitialize. sl::ERROR_CODE is: {}",
365 m_unCameraSerialNumber,
366 sl::toString(slReturnCode).
get());
367 }
368
369 if (!m_slCamera.isObjectDetectionEnabled())
370 {
372 }
373 else
374 {
375
376 LOG_ERROR(logging::g_qSharedLogger,
377 "After reopening ZED stereo camera with serial number {}, object detection failed to reinitialize. sl::ERROR_CODE is: {}",
378 m_unCameraSerialNumber,
379 sl::toString(slReturnCode).
get());
380 }
381 }
382 else
383 {
384
385 LOG_WARNING(logging::g_qSharedLogger,
386 "Attempt to reopen ZED stereo camera with serial number {} has failed! Trying again in 5 seconds...",
387 m_unCameraSerialNumber);
388 }
389
390
391 m_bCameraReopenAlreadyChecked = true;
392 }
393 else if (nTimeSinceEpoch % 5 != 0)
394 {
395
396 m_bCameraReopenAlreadyChecked = false;
397 }
398 }
399 }
400 else
401 {
402
403 lkReadCameraLock.unlock();
404
405 std::unique_lock<std::shared_mutex> lkWriteCameraLock(m_muCameraMutex);
406
407 sl::ERROR_CODE slReturnCode = m_slCamera.grab(m_slRuntimeParams);
408
409 lkWriteCameraLock.unlock();
410
411
412 if (m_bCameraIsFusionMaster)
413 {
414
415 std::unique_lock<std::shared_mutex> lkFusionLock(m_muFusionMutex);
416
417 sl::FUSION_ERROR_CODE slReturnCode = m_slFusionInstance.process();
418
419 lkFusionLock.unlock();
420
421
422 if (slReturnCode != sl::FUSION_ERROR_CODE::SUCCESS && slReturnCode != sl::FUSION_ERROR_CODE::NO_NEW_DATA_AVAILABLE)
423 {
424
425 LOG_WARNING(logging::g_qSharedLogger,
426 "Unable to process fusion data for camera {} ({})! sl::FUSION_ERROR_CODE is: {}",
427 sl::toString(m_slCameraModel).
get(),
428 m_unCameraSerialNumber,
429 sl::toString(slReturnCode).
get());
430 }
431 }
432
433
434 if (slReturnCode == sl::ERROR_CODE::SUCCESS)
435 {
436
437 if (m_bNormalFramesQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
438 {
439
440 slReturnCode = m_slCamera.retrieveImage(m_slFrame, constants::ZED_RETRIEVE_VIEW, m_slMemoryType, sl::Resolution(m_nPropResolutionX, m_nPropResolutionY));
441
442 if (slReturnCode != sl::ERROR_CODE::SUCCESS)
443 {
444
445 LOG_WARNING(logging::g_qSharedLogger,
446 "Unable to retrieve new frame image for stereo camera {} ({})! sl::ERROR_CODE is: {}",
447 sl::toString(m_slCameraModel).
get(),
448 m_unCameraSerialNumber,
449 sl::toString(slReturnCode).
get());
450 }
451 }
452
453
454 if (m_bDepthFramesQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
455 {
456
457 slReturnCode = m_slCamera.retrieveMeasure(m_slDepthMeasure, m_slDepthMeasureType, m_slMemoryType, sl::Resolution(m_nPropResolutionX, m_nPropResolutionY));
458
459 if (slReturnCode != sl::ERROR_CODE::SUCCESS)
460 {
461
462 LOG_WARNING(logging::g_qSharedLogger,
463 "Unable to retrieve new depth measure for stereo camera {} ({})! sl::ERROR_CODE is: {}",
464 sl::toString(m_slCameraModel).
get(),
465 m_unCameraSerialNumber,
466 sl::toString(slReturnCode).
get());
467 }
468
469
470 slReturnCode = m_slCamera.retrieveImage(m_slDepthImage, sl::VIEW::DEPTH, m_slMemoryType, sl::Resolution(m_nPropResolutionX, m_nPropResolutionY));
471
472 if (slReturnCode != sl::ERROR_CODE::SUCCESS)
473 {
474
475 LOG_WARNING(logging::g_qSharedLogger,
476 "Unable to retrieve new depth image for stereo camera {} ({})! sl::ERROR_CODE is: {}",
477 sl::toString(m_slCameraModel).
get(),
478 m_unCameraSerialNumber,
479 sl::toString(slReturnCode).
get());
480 }
481 }
482
483
484 if (m_bPointCloudsQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
485 {
486
487 slReturnCode = m_slCamera.retrieveMeasure(m_slPointCloud, sl::MEASURE::XYZBGRA, m_slMemoryType, sl::Resolution(m_nPropResolutionX, m_nPropResolutionY));
488
489 if (slReturnCode != sl::ERROR_CODE::SUCCESS)
490 {
491
492 LOG_WARNING(logging::g_qSharedLogger,
493 "Unable to retrieve new point cloud for stereo camera {} ({})! sl::ERROR_CODE is: {}",
494 sl::toString(m_slCameraModel).
get(),
495 m_unCameraSerialNumber,
496 sl::toString(slReturnCode).
get());
497 }
498 }
499
500
501 if (m_slCamera.isPositionalTrackingEnabled())
502 {
503
504 if (m_bPosesQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
505 {
506
507 sl::POSITIONAL_TRACKING_STATE slPoseTrackReturnCode;
508
509
510 if (m_bCameraIsFusionMaster)
511 {
512
513 slPoseTrackReturnCode = m_slFusionInstance.getPosition(m_slCameraPose, sl::REFERENCE_FRAME::WORLD);
514 }
515 else
516 {
517
518 slPoseTrackReturnCode = m_slCamera.getPosition(m_slCameraPose, sl::REFERENCE_FRAME::WORLD);
519 }
520
521 if (slPoseTrackReturnCode != sl::POSITIONAL_TRACKING_STATE::OK)
522 {
523
524 LOG_WARNING(logging::g_qSharedLogger,
525 "Unable to retrieve new positional tracking pose for stereo camera {} ({})! sl::POSITIONAL_TRACKING_STATE is: {}",
526 sl::toString(m_slCameraModel).
get(),
527 m_unCameraSerialNumber,
528 sl::toString(slPoseTrackReturnCode).
get());
529 }
530 }
531
532
533 if (m_bCameraIsFusionMaster && m_bGeoPosesQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
534 {
535
536 sl::GNSS_FUSION_STATUS slGeoPoseTrackReturnCode = m_slFusionInstance.getGeoPose(m_slFusionGeoPose);
537
538 if (slGeoPoseTrackReturnCode != sl::GNSS_FUSION_STATUS::OK && slGeoPoseTrackReturnCode != sl::GNSS_FUSION_STATUS::CALIBRATION_IN_PROGRESS)
539 {
540
541 LOG_WARNING(logging::g_qSharedLogger,
542 "Geo pose tracking state for stereo camera {} ({}) is suboptimal! sl::GNSS_FUSION_STATUS is: {}",
543 sl::toString(m_slCameraModel).
get(),
544 m_unCameraSerialNumber,
545 sl::toString(slGeoPoseTrackReturnCode).
get());
546 }
547 }
548
549
550 if (m_bFloorsQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
551 {
552
553 slReturnCode = m_slCamera.findFloorPlane(m_slFloorPlane,
554 m_slFloorTrackingTransform,
555 m_slCameraPose.getTranslation().y,
556 m_slCameraPose.getRotationMatrix(),
557 m_fExpectedCameraHeightFromFloorTolerance);
558
559 if (slReturnCode != sl::ERROR_CODE::SUCCESS)
560 {
561
562 LOG_WARNING(logging::g_qSharedLogger,
563 "Unable to retrieve new floor plane for stereo camera {} ({})! sl::ERROR_CODE is: {}",
564 sl::toString(m_slCameraModel).
get(),
565 m_unCameraSerialNumber,
566 sl::toString(slReturnCode).
get());
567 }
568 }
569 }
570
571
572 if (m_bSensorsQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
573 {
574
575 slReturnCode = m_slCamera.getSensorsData(m_slSensorsData, sl::TIME_REFERENCE::CURRENT);
576
577
578 if (slReturnCode != sl::ERROR_CODE::SUCCESS)
579 {
580
581 LOG_WARNING(logging::g_qSharedLogger,
582 "Unable to retrieve sensor data for stereo camera {} ({})! sl::ERROR_CODE is: {}",
583 sl::toString(m_slCameraModel).
get(),
584 m_unCameraSerialNumber,
585 sl::toString(slReturnCode).
get());
586 }
587 }
588
589
590 if (m_slCamera.isObjectDetectionEnabled())
591 {
592
593 if (m_bObjectsQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
594 {
595
596 slReturnCode = m_slCamera.retrieveObjects(m_slDetectedObjects);
597
598 if (slReturnCode != sl::ERROR_CODE::SUCCESS)
599 {
600
601 LOG_WARNING(logging::g_qSharedLogger,
602 "Unable to retrieve new object data for stereo camera {} ({})! sl::ERROR_CODE is: {}",
603 sl::toString(m_slCameraModel).
get(),
604 m_unCameraSerialNumber,
605 sl::toString(slReturnCode).
get());
606 }
607 }
608
609
610 if (m_slObjectDetectionBatchParams.enable)
611 {
612
613 if (m_bBatchedObjectsQueued.load(ATOMIC_MEMORY_ORDER_METHOD))
614 {
615
616 slReturnCode = m_slCamera.getObjectsBatch(m_slDetectedObjectsBatched);
617
618 if (slReturnCode != sl::ERROR_CODE::SUCCESS)
619 {
620
621 LOG_WARNING(logging::g_qSharedLogger,
622 "Unable to retrieve new batched object data for stereo camera {} ({})! sl::ERROR_CODE is: {}",
623 sl::toString(m_slCameraModel).
get(),
624 m_unCameraSerialNumber,
625 sl::toString(slReturnCode).
get());
626 }
627 }
628 }
629 }
630
631 else if (m_bObjectsQueued.load(std::memory_order_relaxed) || m_bBatchedObjectsQueued.load(std::memory_order_relaxed))
632 {
633
634 LOG_WARNING(logging::g_qSharedLogger,
635 "Unable to retrieve new object data for stereo camera {} ({})! Object detection is disabled!",
636 sl::toString(m_slCameraModel).
get(),
637 m_unCameraSerialNumber);
638 }
639 }
640 else
641 {
642
643 LOG_ERROR(logging::g_qSharedLogger,
644 "Unable to update stereo camera {} ({}) frames, measurements, and sensors! sl::ERROR_CODE is: {}. Closing camera...",
645 sl::toString(m_slCameraModel).
get(),
646 m_unCameraSerialNumber,
647 sl::toString(slReturnCode).
get());
648
649
650 m_slCamera.close();
651 }
652 }
653
654
655 std::shared_lock<std::shared_mutex> lkSchedulers(m_muPoolScheduleMutex);
656
657 if (!m_qFrameCopySchedule.empty() || !m_qGPUFrameCopySchedule.empty() || !m_qCustomBoxIngestSchedule.empty() || !m_qPoseCopySchedule.empty() ||
658 !m_qGeoPoseCopySchedule.empty() || !m_qFloorCopySchedule.empty() || !m_qSensorsCopySchedule.empty() || !m_qObjectDataCopySchedule.empty() ||
659 !m_qObjectBatchedDataCopySchedule.empty())
660 {
661
662 size_t siTotalQueueLength = m_qFrameCopySchedule.size() + m_qGPUFrameCopySchedule.size() + m_qCustomBoxIngestSchedule.size() + m_qPoseCopySchedule.size() +
663 m_qGeoPoseCopySchedule.size() + m_qFloorCopySchedule.size() + m_qSensorsCopySchedule.size() + m_qObjectDataCopySchedule.size() +
664 m_qObjectBatchedDataCopySchedule.size();
665
666
667 this->
RunDetachedPool(siTotalQueueLength, m_nNumFrameRetrievalThreads);
668
669
670 std::chrono::_V2::system_clock::duration tmCurrentTime = std::chrono::high_resolution_clock::now().time_since_epoch();
671
672 if (std::chrono::duration_cast<std::chrono::seconds>(tmCurrentTime).count() % 31 == 0 && !m_bQueueTogglesAlreadyReset)
673 {
674
675 m_bNormalFramesQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
676 m_bDepthFramesQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
677 m_bPointCloudsQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
678 m_bPosesQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
679 m_bGeoPosesQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
680 m_bFloorsQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
681 m_bSensorsQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
682 m_bObjectsQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
683 m_bBatchedObjectsQueued.store(false, ATOMIC_MEMORY_ORDER_METHOD);
684
685
686 m_bQueueTogglesAlreadyReset = true;
687 }
688
689 else if (m_bQueueTogglesAlreadyReset)
690 {
691
692 m_bQueueTogglesAlreadyReset = false;
693 }
694
695
697 }
698
699
700 lkSchedulers.unlock();
701}
void RunDetachedPool(const unsigned int nNumTasksToQueue, const unsigned int nNumThreads=2, const bool bForceStopCurrentThreads=false)
When this method is called, it starts a thread pool full of threads that don't return std::futures (l...
Definition AutonomyThread.hpp:336
void JoinPool()
Waits for pool to finish executing tasks. This method will block the calling code until thread is fin...
Definition AutonomyThread.hpp:439
sl::ERROR_CODE EnableSpatialMapping() override
Enabled the spatial mapping feature of the camera. Pose tracking will be enabled if it is not already...
Definition ZEDCam.cpp:2078
sl::ERROR_CODE EnableObjectDetection(const bool bEnableBatching=false) override
Enables the object detection and tracking feature of the camera.
Definition ZEDCam.cpp:2160
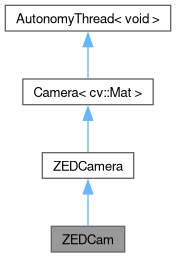
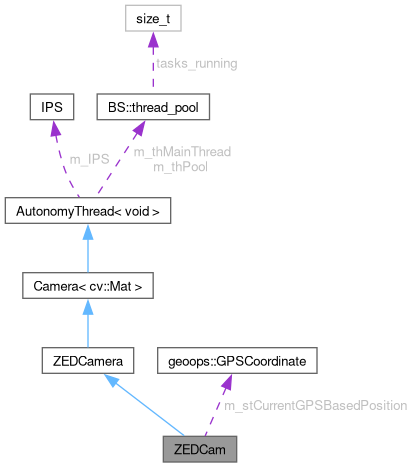
 Public Member Functions inherited from
Public Member Functions inherited from