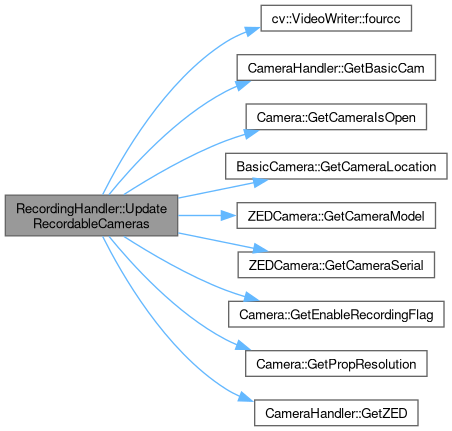
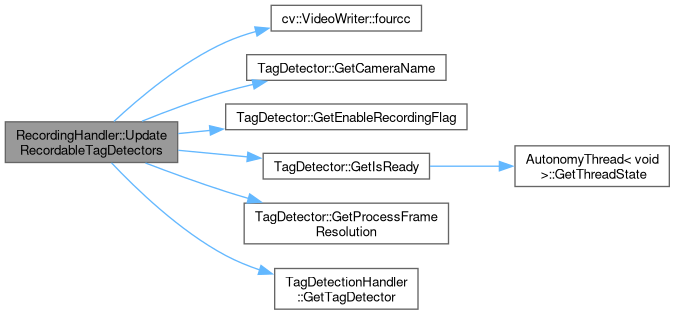
This method is used internally by the class to update the number of cameras that have recording enabled from the camera handler.
173{
174
175 for (int nCamera = int(CameraHandler::BasicCamName::BASICCAM_START) + 1; nCamera != int(CameraHandler::BasicCamName::BASICCAM_END); ++nCamera)
176 {
177
178 std::shared_ptr<BasicCamera> pBasicCamera = globals::g_pCameraHandler->
GetBasicCam(
static_cast<CameraHandler::BasicCamName
>(nCamera));
179
180 m_vBasicCameras[nCamera - 1] = pBasicCamera;
181
182
183 if (pBasicCamera->GetEnableRecordingFlag() && pBasicCamera->GetCameraIsOpen())
184 {
185
186 m_vRecordingToggles[nCamera - 1] = true;
187
188 if (!m_vCameraWriters[nCamera - 1].isOpened())
189 {
190
191 std::filesystem::path szFilePath;
192 std::filesystem::path szFilenameWithExtension;
193 szFilePath = constants::LOGGING_OUTPUT_PATH_ABSOLUTE;
194 szFilePath += logging::g_szProgramStartTimeString + "/cameras";
195 szFilenameWithExtension = pBasicCamera->GetCameraLocation() + ".mkv";
196
197
198 if (!std::filesystem::exists(szFilePath))
199 {
200
201 if (!std::filesystem::create_directories(szFilePath))
202 {
203
204 LOG_ERROR(logging::g_qSharedLogger,
205 "Unable to create the VideoWriter output directory: {} for camera {}",
206 szFilePath.string(),
207 pBasicCamera->GetCameraLocation());
208 }
209 }
210
211
212 std::filesystem::path szFullOutputPath = szFilePath / szFilenameWithExtension;
213
214
215 bool bWriterOpened = m_vCameraWriters[nCamera - 1].open(szFullOutputPath.string(),
217 constants::RECORDER_FPS,
218 pBasicCamera->GetPropResolution());
219
220
221 if (!bWriterOpened)
222 {
223
224 LOG_WARNING(logging::g_qSharedLogger,
225 "RecordingHandler: Failed to open cv::VideoWriter for basic camera at path/index {}",
226 pBasicCamera->GetCameraLocation());
227 }
228 }
229 }
230 else
231 {
232
233 m_vRecordingToggles[nCamera - 1] = false;
234 }
235 }
236
237
238 int nIndexOffset = int(CameraHandler::BasicCamName::BASICCAM_END) - 2;
239
240 for (int nCamera = int(CameraHandler::ZEDCamName::ZEDCAM_START) + 1; nCamera != int(CameraHandler::ZEDCamName::ZEDCAM_END); ++nCamera)
241 {
242
243 std::shared_ptr<ZEDCamera> pZEDCamera = globals::g_pCameraHandler->
GetZED(
static_cast<CameraHandler::ZEDCamName
>(nCamera));
244
245 m_vZEDCameras[nCamera + nIndexOffset] = pZEDCamera;
246
247
248 if (pZEDCamera->GetEnableRecordingFlag() && pZEDCamera->GetCameraIsOpen())
249 {
250
251 m_vRecordingToggles[nCamera + nIndexOffset] = true;
252
253 if (!m_vCameraWriters[nCamera + nIndexOffset].isOpened())
254 {
255
256 std::filesystem::path szFilePath;
257 std::filesystem::path szFilenameWithExtension;
258 szFilePath = constants::LOGGING_OUTPUT_PATH_ABSOLUTE;
259 szFilePath += logging::g_szProgramStartTimeString + "/cameras";
260 szFilenameWithExtension =
261 pZEDCamera->GetCameraModel() + "_" + std::to_string(pZEDCamera->GetCameraSerial()) + ".mkv";
262
263
264 if (!std::filesystem::exists(szFilePath))
265 {
266
267 if (!std::filesystem::create_directories(szFilePath))
268 {
269
270 LOG_ERROR(logging::g_qSharedLogger,
271 "Unable to create the output directory: {} for camera {} ({})",
272 szFilePath.string(),
273 pZEDCamera->GetCameraModel(),
274 pZEDCamera->GetCameraSerial());
275 }
276 }
277
278
279 std::filesystem::path szFullOutputPath = szFilePath / szFilenameWithExtension;
280
281
282 bool bWriterOpened = m_vCameraWriters[nCamera + nIndexOffset].open(szFullOutputPath,
284 constants::RECORDER_FPS,
285 pZEDCamera->GetPropResolution());
286
287
288 if (!bWriterOpened)
289 {
290
291 LOG_WARNING(logging::g_qSharedLogger,
292 "RecordingHandler: Failed to open cv::VideoWriter for ZED camera with serial {}",
293 pZEDCamera->GetCameraSerial());
294 }
295 }
296 }
297 else
298 {
299
300 m_vRecordingToggles[nCamera + nIndexOffset] = false;
301 }
302 }
303}
std::shared_ptr< BasicCamera > GetBasicCam(BasicCamName eCameraName)
Accessor for Basic cameras.
Definition CameraHandler.cpp:189
std::shared_ptr< ZEDCamera > GetZED(ZEDCamName eCameraName)
Accessor for ZED cameras.
Definition CameraHandler.cpp:170
static int fourcc(char c1, char c2, char c3, char c4)
 Public Types inherited from
Public Types inherited from