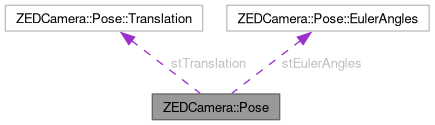
This struct is used within the ZEDCam class to store the camera pose with high precision. The sl::Pose object from the ZEDSDK stores everything as float which is not precise enough for storing relative UTM values. This struct replaces that.
More...
#include <ZEDCamera.hpp>
|
| | Pose (const double dX=0.0, const double dY=0.0, const double dZ=0.0, const double dXO=0.0, const double dYO=0.0, const double dZO=0.0) |
| | Construct a new Pose object.
|
| |
This struct is used within the ZEDCam class to store the camera pose with high precision. The sl::Pose object from the ZEDSDK stores everything as float which is not precise enough for storing relative UTM values. This struct replaces that.
- Author
- clayjay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2024-04-17
◆ Pose()
| ZEDCamera::Pose::Pose |
( |
const double |
dX = 0.0, |
|
|
const double |
dY = 0.0, |
|
|
const double |
dZ = 0.0, |
|
|
const double |
dXO = 0.0, |
|
|
const double |
dYO = 0.0, |
|
|
const double |
dZO = 0.0 |
|
) |
| |
|
inline |
Construct a new Pose object.
- Parameters
-
| dX | - The X position of the camera in ZED_MEASURE_UNITS. |
| dY | - The Y position of the camera in ZED_MEASURE_UNITS. |
| dZ | - The Z position of the camera in ZED_MEASURE_UNITS. |
| dXO | - The tilt of the camera around the X axis in degrees. |
| dYO | - The tilt of the camera around the Y axis in degrees. |
| dZO | - The tilt of the camera around the Z axis in degrees. |
- Author
- clayjay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2024-04-17
116 {
117
118 stTranslation.dX = dX;
119 stTranslation.dY = dY;
120 stTranslation.dZ = dZ;
121 stEulerAngles.dXO = dXO;
122 stEulerAngles.dYO = dYO;
123 stEulerAngles.dZO = dZO;
124 }
The documentation for this struct was generated from the following file: