Run the state machine. Returns the next state.
82 {
83 LOG_DEBUG(logging::g_qSharedLogger, "VerifyingPositionState: Running state-specific behavior.");
84
85 std::chrono::system_clock::time_point tmCurrentTime = std::chrono::system_clock::now();
86 double dTimeElapsed = std::chrono::duration_cast<std::chrono::milliseconds>(tmCurrentTime - m_tmVerifyStartTime).count() / 1000.0;
87
88 if (dTimeElapsed <= constants::NAVIGATING_VERIFY_SAMPLE_TIME)
89 {
90 if (!globals::g_pNavigationBoard->IsOutOfDate())
91 {
92 m_vCheckPoints.emplace_back(globals::g_pNavigationBoard->GetGPSData());
93 }
94 }
95 else
96 {
97
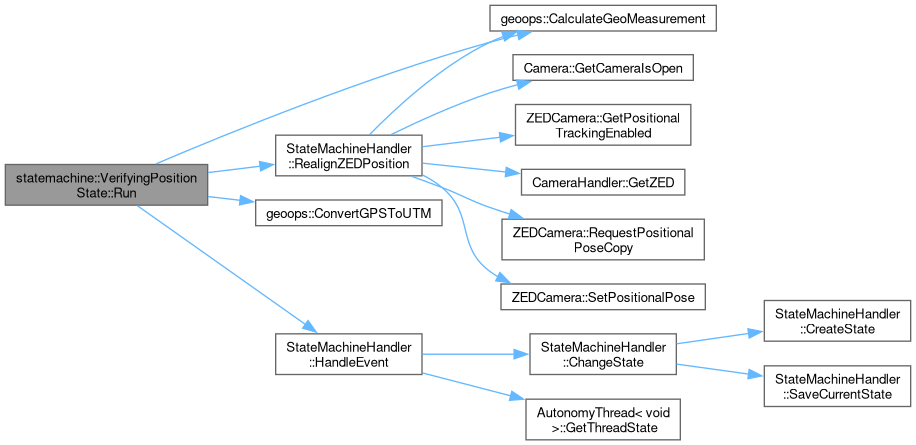
98 globals::g_pStateMachineHandler->
RealignZEDPosition(CameraHandler::ZEDCamName::eHeadMainCam,
100 globals::g_pNavigationBoard->GetHeading());
101
102
104
105
107 {
108 stAverage.dLatitude += stPoint.dLatitude;
109 stAverage.dLongitude += stPoint.dLongitude;
110 }
111
112
113 stAverage.dLatitude /= m_vCheckPoints.size();
114 stAverage.dLongitude /= m_vCheckPoints.size();
115
116
119
120
121 if (stGoalWaypointMeasurement.dDistanceMeters > constants::NAVIGATING_REACHED_GOAL_RADIUS)
122 {
123
124 globals::g_pStateMachineHandler->
HandleEvent(Event::eVerifyingFailed,
false);
125 }
126 else
127 {
128
129 globals::g_pStateMachineHandler->
HandleEvent(Event::eVerifyingComplete,
false);
130 }
131 }
132 }
void RealignZEDPosition(CameraHandler::ZEDCamName eCameraName, const geoops::UTMCoordinate &stNewCameraPosition, const double dNewCameraHeading)
This is used to realign the ZEDs forward direction with the rover's current compass heading....
Definition StateMachineHandler.cpp:648
void HandleEvent(statemachine::Event eEvent, const bool bSaveCurrentState=false)
This method Handles Events that are passed to the State Machine Handler. It will check the current st...
Definition StateMachineHandler.cpp:353
UTMCoordinate ConvertGPSToUTM(const GPSCoordinate &stGPSCoord)
Given a GPS coordinate, convert to UTM and create a new UTMCoordinate object.
Definition GeospatialOperations.hpp:333
GeoMeasurement CalculateGeoMeasurement(const GPSCoordinate &stCoord1, const GPSCoordinate &stCoord2)
The shortest path between two points on an ellipsoid at (lat1, lon1) and (lat2, lon2) is called the g...
Definition GeospatialOperations.hpp:553
This struct stores/contains information about a GPS data.
Definition GeospatialOperations.hpp:100
This struct is used to store the distance, arc length, and relative bearing for a calculated geodesic...
Definition GeospatialOperations.hpp:83
 Public Member Functions inherited from
Public Member Functions inherited from