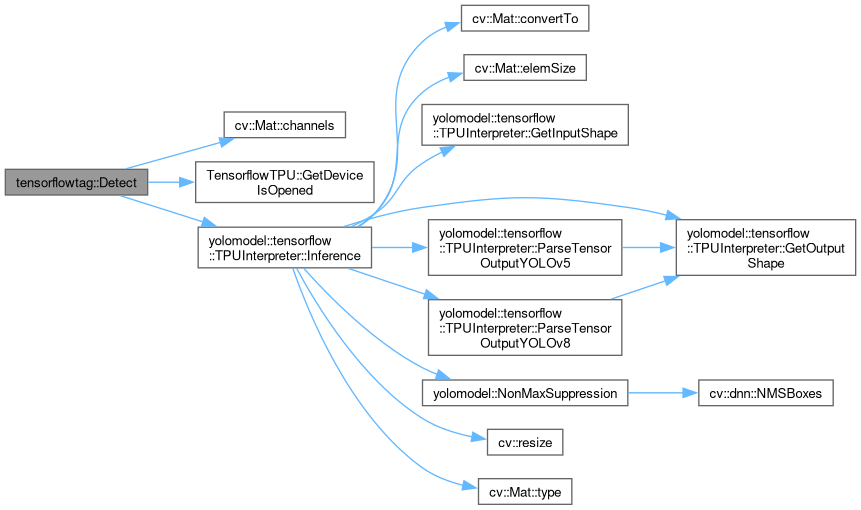
Detect ArUco tags in the provided image using a YOLO DNN model.
98 {
99
101 {
102
103 LOG_ERROR(logging::g_qSharedLogger, "Detect() requires a RGB image.");
104 return {};
105 }
106
107
108 std::vector<TensorflowTag> vDetectedTags;
109
110
112 {
113
114 std::vector<std::vector<yolomodel::Detection>> vOutputTensorTags = tfTensorflowDetector.
Inference(cvFrame, fMinObjectConfidence, fNMSThreshold);
115
116
117 for (std::vector<yolomodel::Detection> vTagDetections : vOutputTensorTags)
118 {
119
121 {
122
123 TensorflowTag stDetectedTag;
124 stDetectedTag.dConfidence = stTagDetection.fConfidence;
125 stDetectedTag.CornerTL =
cv::Point2f(stTagDetection.cvBoundingBox.x, stTagDetection.cvBoundingBox.y);
126 stDetectedTag.CornerTR =
cv::Point2f(stTagDetection.cvBoundingBox.x + stTagDetection.cvBoundingBox.width, stTagDetection.cvBoundingBox.y);
127 stDetectedTag.CornerBL =
cv::Point2f(stTagDetection.cvBoundingBox.x, stTagDetection.cvBoundingBox.y + stTagDetection.cvBoundingBox.height);
128 stDetectedTag.CornerBR =
cv::Point2f(stTagDetection.cvBoundingBox.x + stTagDetection.cvBoundingBox.width,
129 stTagDetection.cvBoundingBox.y + stTagDetection.cvBoundingBox.height);
130
131
132 vDetectedTags.emplace_back(stDetectedTag);
133 }
134 }
135 }
136 else
137 {
138
139 LOG_WARNING(logging::g_qSharedLogger,
140 "TensorflowDetect: Unable to detect tags using YOLO tensorflow detection because hardware is not opened or model is not initialized.");
141 }
142
143
144 return vDetectedTags;
145 }
bool GetDeviceIsOpened() const
Accessor for the Device Is Opened private member.
Definition TensorflowTPU.hpp:347
std::vector< std::vector< Detection > > Inference(const cv::Mat &cvInputFrame, const float fMinObjectConfidence=0.85, const float fNMSThreshold=0.6) override
Given an input image forward the image through the YOLO model to run inference on the EdgeTPU,...
Definition YOLOModel.hpp:270
This struct is used to.
Definition YOLOModel.hpp:42