Run the state machine. Returns the next state.
87 {
88
89 LOG_DEBUG(logging::g_qSharedLogger, "VerifyingMarkerState: Running state-specific behavior.");
90
91
94
95 std::chrono::system_clock::time_point tmCurrentTime = std::chrono::system_clock::now();
96 double dElapsedTime = std::chrono::duration_cast<std::chrono::milliseconds>(tmCurrentTime - m_tmTagVerificationStartTime).count() / 1000.0;
97
98 double dTimeSinceLastSeen = std::chrono::duration_cast<std::chrono::milliseconds>(tmCurrentTime - m_tmTagLastSeenTime).count() / 1000.0;
99
100
101
102
103
104
105 if (stBestArucoTag.nID == -1 && stBestTorchTag.dConfidence == 0.0)
106 {
107
108 if (dTimeSinceLastSeen > constants::APPROACH_MARKER_TAG_LOST_BUFFER_TIME)
109 {
110
111 LOG_INFO(logging::g_qSharedLogger, "VerifyingMarkerState: No tags detected. Triggering verify failed event.");
112 globals::g_pStateMachineHandler->
HandleEvent(Event::eVerifyingFailed);
113 return;
114 }
115 }
116 else
117 {
118
119 if (stBestArucoTag.nID != -1 && stBestArucoTag.dStraightLineDistance > constants::APPROACH_MARKER_PROXIMITY_THRESHOLD)
120 {
121
122 LOG_INFO(logging::g_qSharedLogger, "VerifyingMarkerState: ArUco tag detected but too far away. Triggering verify failed event.");
123 globals::g_pStateMachineHandler->
HandleEvent(Event::eVerifyingFailed);
124 return;
125 }
126 else if (stBestTorchTag.dConfidence > 0.0 && stBestTorchTag.dStraightLineDistance > constants::APPROACH_MARKER_PROXIMITY_THRESHOLD)
127 {
128
129 LOG_INFO(logging::g_qSharedLogger, "VerifyingMarkerState: Torch tag detected but too far away. Triggering verify failed event.");
130 globals::g_pStateMachineHandler->
HandleEvent(Event::eVerifyingFailed);
131 return;
132 }
133
134
135 m_tmTagLastSeenTime = std::chrono::system_clock::now();
136
137
138 if (dElapsedTime >= constants::APPROACH_MARKER_VERIFY_TIME)
139 {
140
141 LOG_INFO(logging::g_qSharedLogger, "VerifyingMarkerState: Marker verified. Triggering verify complete event.");
142
143 globals::g_pStateMachineHandler->
HandleEvent(Event::eVerifyingComplete);
144 return;
145 }
146 }
147 }
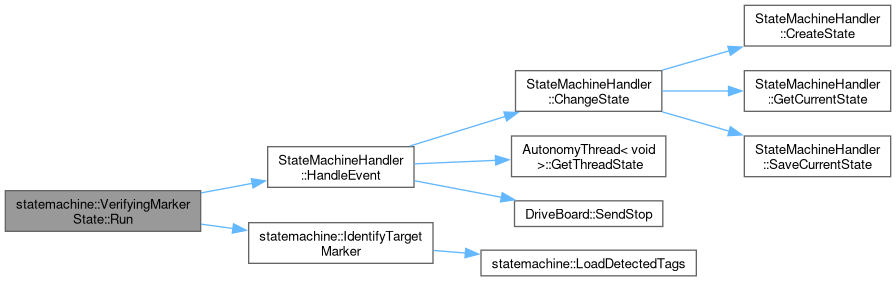
void HandleEvent(statemachine::Event eEvent, const bool bSaveCurrentState=false)
This method Handles Events that are passed to the State Machine Handler. It will check the current st...
Definition StateMachineHandler.cpp:353
int IdentifyTargetMarker(const std::vector< std::shared_ptr< TagDetector > > &vTagDetectors, tagdetectutils::ArucoTag &stArucoTarget, tagdetectutils::ArucoTag &stTorchTarget, const int nTargetTagID=static_cast< int >(manifest::Autonomy::AUTONOMYWAYPOINTTYPES::ANY))
Identify a target marker in the rover's vision, using OpenCV detection.
Definition TagDetectionChecker.hpp:91
Represents a single ArUco tag. Combines attributes from TorchTag, TensorflowTag, and the original Aru...
Definition TagDetectionUtilty.hpp:59
 Public Member Functions inherited from
Public Member Functions inherited from