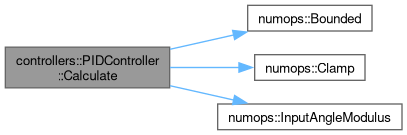
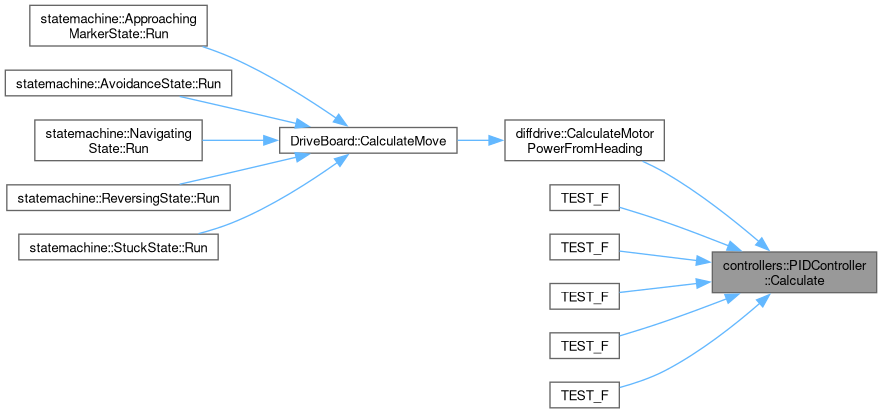
Calculate the next control output given the current actual and a setpoint.
78 {
79
80 double dPTermOutput;
81 double dITermOutput;
82 double dDTermOutput;
83 double dFFTermOutput;
84 double dOutput;
85
86
87 m_dSetpoint = dSetpoint;
88
89
90 if (m_dMaxSetpointDifference != 0)
91 {
92
93 m_dSetpoint =
numops::Clamp(m_dSetpoint, dActual - m_dMaxSetpointDifference, dActual + m_dMaxSetpointDifference);
94 }
95
96
97 double dError = dSetpoint - dActual;
98
100 {
101
102 dError = 0.0;
103 }
104
105
106 if (m_bControllerIsContinuous)
107 {
108
109 double dErrorBound = (m_dMaximumContinuousInput - m_dMinimumContinuousInput) / 2.0;
110
112 }
113
114
115 dFFTermOutput = m_dKff * dSetpoint;
116
117 dPTermOutput = m_dKp * dError;
118
119
120 if (m_bFirstCalculation)
121 {
122
123 m_dLastError = dError;
124
125 m_dLastControlOutput = dPTermOutput + dFFTermOutput;
126
127
128 m_bFirstCalculation = false;
129 }
130
131
132
133
134 dDTermOutput = -m_dKd * (dError - m_dLastError);
135 m_dLastError = dError;
136
137
138
139
140
141
142 dITermOutput = m_dKi * m_dErrorSum;
143
144 if (m_dMaxIEffort != 0)
145 {
146
147 dITermOutput =
numops::Clamp(dITermOutput, -m_dMaxIEffort, m_dMaxIEffort);
148 }
149
150
151 dOutput = dFFTermOutput + dPTermOutput + dITermOutput + dDTermOutput;
152
153 if (m_dMinEffort != m_dMaxEffort && !
numops::Bounded(dOutput, m_dMinEffort, m_dMaxEffort))
154 {
155
156
157 m_dErrorSum = dError;
158 }
159
160 else if (m_dOutputRampRate != 0 && !
numops::Bounded(dOutput, m_dLastControlOutput - m_dOutputRampRate, m_dLastControlOutput + m_dOutputRampRate))
161 {
162
163
164 m_dErrorSum = dError;
165 }
166
167 else if (m_dMaxIEffort != 0)
168 {
169
170 m_dErrorSum =
numops::Clamp(m_dErrorSum + dError, -m_dMaxIError, m_dMaxIError);
171 }
172 else
173 {
174
175 m_dErrorSum += dError;
176 }
177
178
179 if (m_dOutputRampRate != 0)
180 {
181
182 dOutput =
numops::Clamp(dOutput, m_dLastControlOutput - m_dOutputRampRate, m_dLastControlOutput + m_dOutputRampRate);
183 }
184
185 if (m_dMinEffort != m_dMaxEffort)
186 {
187
188 dOutput =
numops::Clamp(dOutput, m_dMinEffort, m_dMaxEffort);
189 }
190
191 if (m_dOutputFilter != 0)
192 {
193
194 dOutput = (m_dLastControlOutput * m_dOutputFilter) + (dOutput * (1 - m_dOutputFilter));
195 }
196
197
198 m_dLastControlOutput = dOutput;
199
200
201 return dOutput;
202 }
constexpr T Clamp(T tValue, T tMin, T tMax)
Clamps a given value from going above or below a given threshold.
Definition NumberOperations.hpp:81
constexpr T InputAngleModulus(T tValue, T tMinValue, T tMaxValue)
Calculates the modulus of an input angle.
Definition NumberOperations.hpp:165
bool Bounded(T tValue, T tMin, T tMax, const bool bInclusive=true)
Checks if a given value is between the given maximum and minimum ranges.
Definition NumberOperations.hpp:101