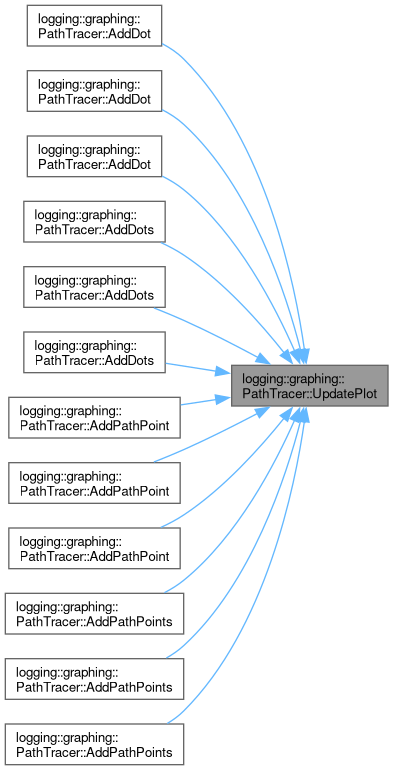
Update the plot with the new waypoints and redraw the plot.
771 {
772
773 std::vector<std::string> vLayerNames;
774 bool bAnyLayerPlotted = false;
775
776
777 m_mtRoverPathAxes->clear();
778
779
780
781
782
783 for (const std::pair<const std::string, const std::string>& stdLayer : m_umPathLineStyleMap)
784 {
785
786 if (m_umPathMap[stdLayer.first].size() > 1)
787 {
788
789 vLayerNames.push_back(stdLayer.first);
790 bAnyLayerPlotted = true;
791
792
793 if (m_bEnable3D)
794 {
795
796 std::vector<double> vEasting, vNorthing, vAltitude;
797 for (const std::tuple<double, double, double>& stCoordinate : m_umPathMap[stdLayer.first])
798 {
799 vEasting.push_back(std::get<0>(stCoordinate));
800 vNorthing.push_back(std::get<1>(stCoordinate));
801 vAltitude.push_back(std::get<2>(stCoordinate));
802 }
803
804
805 m_mtRoverPathAxes->plot3(vEasting, vNorthing, vAltitude, std::string_view(stdLayer.second));
806 }
807 else
808 {
809
810 std::vector<double> vEasting, vNorthing;
811 for (const std::tuple<double, double, double>& stCoordinate : m_umPathMap[stdLayer.first])
812 {
813 vEasting.push_back(std::get<0>(stCoordinate));
814 vNorthing.push_back(std::get<1>(stCoordinate));
815 }
816
817
818 m_mtRoverPathAxes->plot(vEasting, vNorthing, std::string_view(stdLayer.second));
819 }
820
821
822 m_mtRoverPathAxes->hold(true);
823 }
824 }
825
826
827
828
829
830 for (const std::pair<const std::string, const std::pair<std::string, bool>>& stdLayer : m_umDotLineStyleMap)
831 {
832
833 if (m_umDotMap[stdLayer.first].size() > 0)
834 {
835
836 vLayerNames.push_back(stdLayer.first);
837 bAnyLayerPlotted = true;
838
839
840 if (m_bEnable3D)
841 {
842
843 std::vector<double> vEasting, vNorthing, vAltitude, vRadius;
844 for (const std::tuple<double, double, double, double>& stCoordinate : m_umDotMap[stdLayer.first])
845 {
846 vEasting.push_back(std::get<0>(stCoordinate));
847 vNorthing.push_back(std::get<1>(stCoordinate));
848 vAltitude.push_back(std::get<2>(stCoordinate));
849 vRadius.push_back(std::get<3>(stCoordinate));
850 }
851
852
853 matplot::line_handle mtLineHandle = m_mtRoverPathAxes->scatter3(vEasting, vNorthing, vAltitude, vRadius);
854
855 mtLineHandle->color(stdLayer.second.first);
856 mtLineHandle->marker_face(stdLayer.second.second);
857 }
858 else
859 {
860
861 std::vector<double> vEasting, vNorthing, vRadius;
862 for (const std::tuple<double, double, double, double>& stCoordinate : m_umDotMap[stdLayer.first])
863 {
864 vEasting.push_back(std::get<0>(stCoordinate));
865 vNorthing.push_back(std::get<1>(stCoordinate));
866 vRadius.push_back(std::get<3>(stCoordinate));
867 }
868
869
870 matplot::line_handle mtLineHandle = m_mtRoverPathAxes->scatter(vEasting, vNorthing, vRadius);
871
872 mtLineHandle->color(stdLayer.second.first);
873 mtLineHandle->marker_face(stdLayer.second.second);
874 }
875
876
877 m_mtRoverPathAxes->hold(true);
878 }
879 }
880
881
882 if (!bAnyLayerPlotted)
883 {
884
885 return;
886 }
887
888
889 m_mtRoverPathAxes->legend(vLayerNames);
890 matplot::legend_handle mtLegend = m_mtRoverPathAxes->legend();
891 mtLegend->font_size(8);
892 mtLegend->num_columns(2);
893
894 m_mtRoverPathAxes->grid(true);
895 m_mtRoverPathAxes->xtickangle(45);
896 m_mtRoverPathAxes->axis(matplot::square);
897 m_mtRoverPathAxes->xtickformat("%.0f");
898 m_mtRoverPathAxes->ytickformat("%.0f");
899 m_mtRoverPathAxes->ztickformat("%.0f");
900
901 m_mtRoverPathAxes->hold(false);
902
903 m_mtRoverPathPlot->draw();
904 m_mtRoverPathPlot->save(m_szCurrentPlotSavePath);
905 }