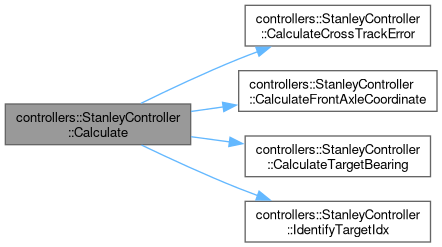
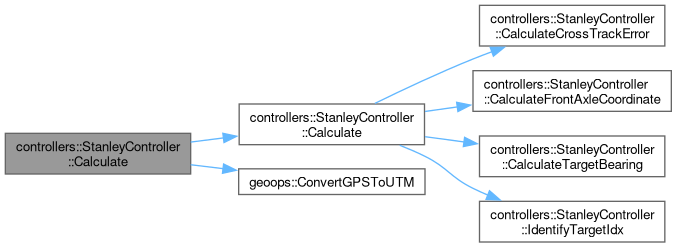
Calculate the steering control adjustment for an agent using the Stanley method.
This function computes the necessary change in yaw (steering angle) to align the agent with the predetermined path. The steering angle is limited by the proportional gain constant to prevent excessively sharp turns.
140 {
141
142 if (dCurrentHeading < 0 || dCurrentHeading > 360)
143 {
144 LOG_ERROR(logging::g_qSharedLogger, "Heading must be in the interval [0-360]. Received: {}", dCurrentHeading);
145 return 0;
146 }
147
148 if (m_vUTMPath.empty())
149 {
150 LOG_ERROR(logging::g_qSharedLogger, "No path has been loaded.");
151 return 0;
152 }
153
154
156
157
159
160
161 unTargetIdx = std::max(unTargetIdx, m_unLastTargetIdx);
162 m_unLastTargetIdx = unTargetIdx;
163
164
166
167
168 double dYawError = numops::InputAngleModulus<double>(dTargetYaw - dCurrentHeading, -180.0, 180.0);
169
170
172 double dDeltaYaw = dYawError + std::atan2(m_dKp * dCrossTrackError, dVelocity);
173
174
175 if (std::abs(dDeltaYaw) < m_dYawTolerance)
176 {
177 dDeltaYaw = 0;
178 }
179
180
181 return numops::InputAngleModulus<double>(dCurrentHeading + dDeltaYaw, 0, 360);
182 }
geoops::UTMCoordinate CalculateFrontAxleCoordinate(const geoops::UTMCoordinate &stUTMCurrPos, const double dCurrentHeading) const
Calculate the UTM coordinate of the center of the agent's front axle.
Definition StanleyController.cpp:434
double CalculateTargetBearing(const unsigned int unTargetIdx) const
Calculate the required heading to navigate from the current target point to the subsequent point on t...
Definition StanleyController.cpp:504
unsigned int IdentifyTargetIdx(const geoops::UTMCoordinate &stUTMFrontAxlePos) const
Identifies the closest point to the center of the agent's front axle on the path.
Definition StanleyController.cpp:469
double CalculateCrossTrackError(const geoops::UTMCoordinate &stUTMFrontAxlePos, const unsigned int unTargetIdx, const double dCurrentHeading) const
Calculate the cross track error. This error expresses how far off the agent is from the path (lateral...
Definition StanleyController.cpp:558
This struct stores/contains information about a UTM coordinate.
Definition GeospatialOperations.hpp:195