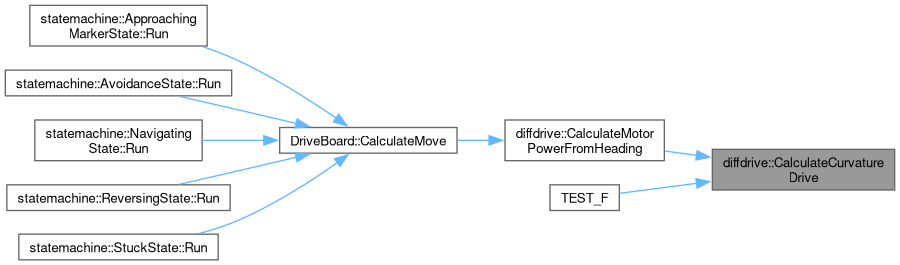
Curvature drive inverse kinematics for differential drive robots. The rotation parameter controls the curvature of the robot's path rather than it's rate of heading change. This makes the robot more controllable at high speeds.
171 {
172
173 double dLeftSpeed = 0.0;
174 double dRightSpeed = 0.0;
175
176
177 dSpeed = std::clamp(dSpeed, -1.0, 1.0);
178 dRotation = std::clamp(dRotation, -1.0, 1.0);
179
180
181 if (bSquareInputs)
182 {
183
184 dSpeed = std::copysign(dSpeed * dSpeed, dSpeed);
185 dRotation = std::copysign(dRotation * dRotation, dRotation);
186 }
187
188
189 if (bAllowTurnInPlace && dSpeed <= 0.05)
190 {
191
192 dLeftSpeed = dSpeed + dRotation;
193 dRightSpeed = dSpeed - dRotation;
194 }
195 else
196 {
197
198 dLeftSpeed = dSpeed + std::abs(dSpeed) * dRotation;
199 dRightSpeed = dSpeed - std::abs(dSpeed) * dRotation;
200 }
201
202
203 double dMaxMagnitude = std::max(std::abs(dLeftSpeed), std::abs(dRightSpeed));
204 if (dMaxMagnitude > 1.0)
205 {
206 dLeftSpeed /= dMaxMagnitude;
207 dRightSpeed /= dMaxMagnitude;
208 }
209
210
211 return {dLeftSpeed, dRightSpeed};
212 }