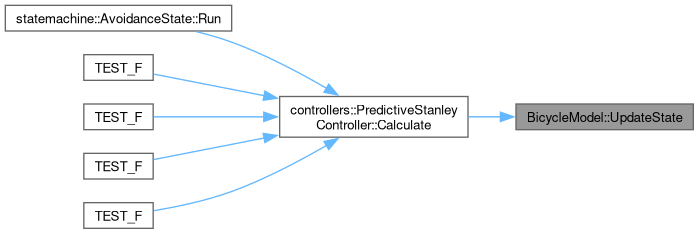
Update the state of the model, given a new position and heading. This method will automatically calculate the velocity of the rover base on the new and current position. The steering angle is also updated automatically based on the new and current heading.
155 {
156
157 if (m_dVelocity == -1.0)
158 {
159
160 m_dVelocity = 0.0;
161 }
162
163 else if (dXPosition != m_dXPosition || dYPosition != m_dYPosition)
164 {
165
166 std::chrono::system_clock::time_point tmCurrentTime = std::chrono::system_clock::now();
167 double dTimeElapsed = std::chrono::duration_cast<std::chrono::milliseconds>(tmCurrentTime - m_tmLastUpdateTime).count() / 1000.0;
168 m_dVelocity = std::sqrt(std::pow(dXPosition - m_dXPosition, 2) + std::pow(dYPosition - m_dYPosition, 2)) / dTimeElapsed;
169
170
171 m_tmLastUpdateTime = tmCurrentTime;
172 }
173
174
175 m_dSteeringAngle = (std::atan2(dYPosition - m_dYPosition, dXPosition - m_dXPosition) * 180.0 / M_PI) - m_dTheta;
176
178
179
180 m_dXPosition = dXPosition;
181 m_dYPosition = dYPosition;
182 m_dTheta = dTheta;
183 }
constexpr T InputAngleModulus(T tValue, T tMinValue, T tMaxValue)
Calculates the modulus of an input angle.
Definition NumberOperations.hpp:165