Defines and implements functions related to operations on location or orientation coordinate systems within the geoops namespace.
More...
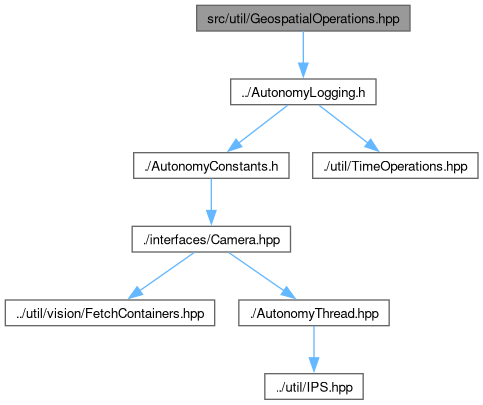
Go to the source code of this file.
|
| namespace | geoops |
| | Namespace containing functions related to operations on global position number systems and other datatypes.
|
| |
|
| enum class | WaypointType {
eNavigationWaypoint
, eTagWaypoint
, eMalletWaypoint
, eWaterBottleWaypoint
,
eRockPickWaypoint
, eObjectWaypoint
, eObstacleWaypoint
, eUNKNOWN
} |
| |
| enum class | PositionFixType {
eNoFix
, eDeadReckoning
, eFix2D
, eFix3D
,
eGNSSDeadReckoningCombined
, eTimeOnly
, eUNKNOWN
} |
| |
|
| UTMCoordinate | geoops::ConvertGPSToUTM (const GPSCoordinate &stGPSCoord) |
| | Given a GPS coordinate, convert to UTM and create a new UTMCoordinate object.
|
| |
| GPSCoordinate | geoops::ConvertUTMToGPS (const UTMCoordinate &stUTMCoord) |
| | Given a UTM coordinate, convert to GPS and create a new GPSCoordinate object.
|
| |
| GeoMeasurement | geoops::CalculateGeoMeasurement (const GPSCoordinate &stCoord1, const GPSCoordinate &stCoord2) |
| | The shortest path between two points on an ellipsoid at (lat1, lon1) and (lat2, lon2) is called the geodesic. Given those two points create an ellipsoid with earth's characteristics and find the distance between them.
|
| |
| GeoMeasurement | geoops::CalculateGeoMeasurement (const UTMCoordinate &stCoord1, const UTMCoordinate &stCoord2) |
| | The shortest path between two points on an ellipsoid at (easting1, northing1) and (easting2, northing2) is called the geodesic. Given those two points create an ellipsoid with earth's characteristics and find the distance between them.
|
| |
| GeoMeasurement | geoops::CalculateGeoMeasurement (const geoops::Waypoint &stWaypoint1, const geoops::Waypoint &stWaypoint2) |
| | The shortest path between two waypoints on an ellipsoid at (lat1, lon1) and (lat2, lon2) is called the geodesic.
|
| |
Defines and implements functions related to operations on location or orientation coordinate systems within the geoops namespace.
- Author
- ClayJay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2023-09-30
- Copyright
- Copyright Mars Rover Design Team 2023 - All Rights Reserved