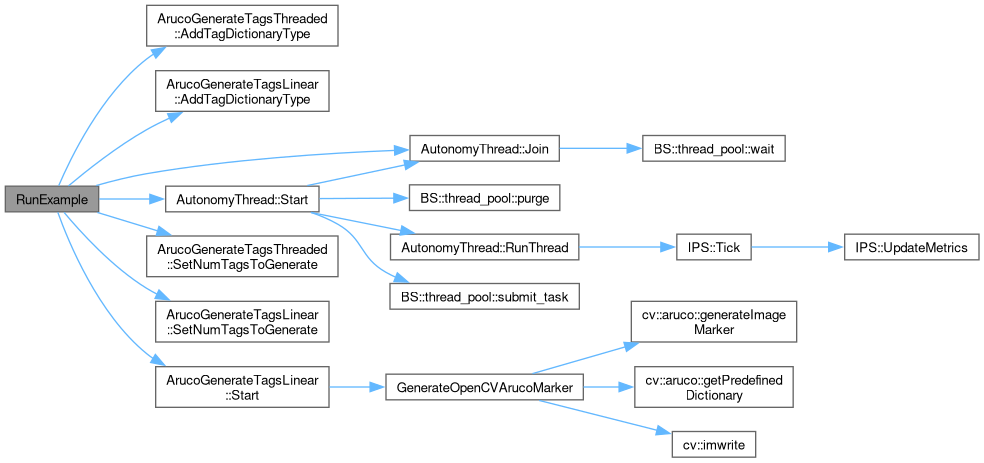
Main example method.
Linear generator.
Threaded generator.
208{
212
213 std::chrono::time_point tmStartTime = std::chrono::high_resolution_clock::now();
214
215
217
218
224
225 LinearTagGenerator.
Start();
226
227
233
234 LinearTagGenerator.
Start();
235
236
242
243 LinearTagGenerator.
Start();
244
245
251
252 LinearTagGenerator.
Start();
253
254
255 std::chrono::time_point tmEndTime = std::chrono::high_resolution_clock::now();
256
257 int nSingledThreadedDuration = std::chrono::duration_cast<std::chrono::milliseconds>(tmEndTime - tmStartTime).count();
258
259 std::cout << "Time taken for single threaded generator: " << nSingledThreadedDuration << " milliseconds." << std::endl;
260
261
262 for (
const std::filesystem::directory_entry& stdEntry :
std::filesystem::directory_iterator(
"."))
263 {
264
265 if (std::filesystem::is_regular_file(stdEntry) && stdEntry.path().extension() == ".png")
266 {
267
268 std::filesystem::remove(stdEntry.path());
269 }
270 }
271
275
276 tmStartTime = std::chrono::high_resolution_clock::now();
277
278
283
284
290
291 ThreadedTagGenerator1.
Start();
292
293
299
300 ThreadedTagGenerator2.
Start();
301
302
308
309 ThreadedTagGenerator3.
Start();
310
311
317
318 ThreadedTagGenerator4.
Start();
319
320
321 ThreadedTagGenerator1.
Join();
322 ThreadedTagGenerator2.
Join();
323 ThreadedTagGenerator3.
Join();
324 ThreadedTagGenerator4.
Join();
325
326
327 tmEndTime = std::chrono::high_resolution_clock::now();
328
329 int nMultiThreadedDuration = std::chrono::duration_cast<std::chrono::milliseconds>(tmEndTime - tmStartTime).count();
330
331 std::cout << "Time taken for multithreaded generator: " << nMultiThreadedDuration << " milliseconds." << std::endl;
332 std::cout << "\n\nCheck your build directory for all aruco tags!" << std::endl;
333}
void Join()
Waits for thread to finish executing and then closes thread. This method will block the calling code ...
Definition AutonomyThread.hpp:180
void Start()
When this method is called, it starts a new thread that runs the code within the ThreadedContinuousCo...
Definition AutonomyThread.hpp:117