196{
197 LOG_INFO(logging::g_qSharedLogger, "WebRTC camera {} opening WebSocket to {}...", m_szStreamerID, szSignallingServerURL);
198
199 m_pWebSocket->open(szSignallingServerURL);
200
202
204
205
206 m_pWebSocket->onOpen(
207 [this]()
208 {
209
210 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} WebSocket OPEN. Connected to {}. Sending 'listStreamers'...", m_szStreamerID, m_szSignallingServerURL);
211
212
213 nlohmann::json jsnStreamList;
214 jsnStreamList["type"] = "listStreamers";
215 m_pWebSocket->send(jsnStreamList.dump());
216 });
217
218
219 m_pWebSocket->onClosed(
220 [this]()
221 {
222
223 LOG_INFO(logging::g_qSharedLogger, "WebRTC camera {} WebSocket CLOSED. Disconnected from signalling server.", m_szStreamerID);
224 });
225
226
227 m_pWebSocket->onMessage(
228 [this](std::variant<rtc::binary, rtc::string> rtcMessage)
229 {
230 try
231 {
232
233 nlohmann::json jsnMessage;
234
235
236 if (std::holds_alternative<rtc::string>(rtcMessage))
237 {
238
239 std::string szMessage = std::get<rtc::string>(rtcMessage);
240
241
242 jsnMessage = nlohmann::json::parse(szMessage);
243 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} WS Message (String): {}", m_szStreamerID, szMessage);
244 }
245 else if (std::holds_alternative<rtc::binary>(rtcMessage))
246 {
247
248 rtc::binary rtcBinaryData = std::get<rtc::binary>(rtcMessage);
249
250 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} WS Message (Binary) of length: {}", m_szStreamerID, rtcBinaryData.size());
251
252
253 std::string szBinaryDataStr(reinterpret_cast<const char*>(rtcBinaryData.data()), rtcBinaryData.size());
254
255 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} WS Binary Content: {}", m_szStreamerID, szBinaryDataStr);
256
257 jsnMessage = nlohmann::json::parse(szBinaryDataStr);
258 }
259 else
260 {
261 LOG_ERROR(logging::g_qSharedLogger, "WebRTC camera {} WS Received unknown message type.", m_szStreamerID);
262 }
263
264
265 if (jsnMessage.contains("type"))
266 {
267 std::string szType = jsnMessage["type"];
268
269 if (szType == "config")
270 {
271
272 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Received 'config': {}", m_szStreamerID, jsnMessage.dump());
273 }
274
275 else if (szType == "offer")
276 {
277
278 std::string sdp = jsnMessage["sdp"];
279 m_pPeerConnection->setRemoteDescription(rtc::Description(sdp, "offer"));
280 LOG_DEBUG(logging::g_qSharedLogger,
281 "WebRTC camera {} Received 'offer'. SDP Length: {}. Setting Remote Description...",
282 m_szStreamerID,
283 sdp.length());
284
285
286 m_pPeerConnection->setLocalDescription();
287 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Triggered setLocalDescription() to generate answer.", m_szStreamerID);
288 }
289
290 else if (szType == "answer")
291 {
292
293 std::string sdp = jsnMessage["sdp"];
294 m_pPeerConnection->setRemoteDescription(rtc::Description(sdp, "answer"));
295 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Received 'answer'. Setting Remote Description.", m_szStreamerID);
296 }
297
298 else if (szType == "iceCandidate")
299 {
300
301 nlohmann::json jsnCandidate = jsnMessage["candidate"];
302 std::string szCandidateStr = jsnCandidate["candidate"];
303
304 rtc::Candidate rtcCandidate = rtc::Candidate(szCandidateStr);
305 m_pPeerConnection->addRemoteCandidate(rtcCandidate);
306 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Received 'iceCandidate'. Added: {}", m_szStreamerID, szCandidateStr);
307 }
308 else if (szType == "streamerList")
309 {
310
311 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Received 'streamerList': {}", m_szStreamerID, jsnMessage.dump());
312
313
314 if (jsnMessage.contains("ids"))
315 {
316 std::vector<std::string> streamerList = jsnMessage["ids"].get<std::vector<std::string>>();
317 if (std::find(streamerList.begin(), streamerList.end(), m_szStreamerID) != streamerList.end())
318 {
319
320 nlohmann::json jsnStream;
321 jsnStream["type"] = "subscribe";
322 jsnStream["streamerId"] = m_szStreamerID;
323 m_pWebSocket->send(jsnStream.dump());
324
325 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Streamer ID {} found! Sending 'subscribe'...", m_szStreamerID, m_szStreamerID);
326 }
327 else
328 {
329 LOG_ERROR(logging::g_qSharedLogger, "WebRTC camera {} Streamer ID {} NOT found in streamer list!", m_szStreamerID, m_szStreamerID);
330 }
331 }
332 else
333 {
334 LOG_ERROR(logging::g_qSharedLogger, "WebRTC camera {} Streamer list does not contain 'ids' field!", m_szStreamerID);
335 }
336 }
337 else
338 {
339 LOG_ERROR(logging::g_qSharedLogger, "WebRTC camera {} Unknown message type received: {}", m_szStreamerID, szType);
340 }
341 }
342 }
343 catch (const std::exception& e)
344 {
345
346 LOG_ERROR(logging::g_qSharedLogger, "WebRTC camera {} Exception during Negotiation: {}", m_szStreamerID, e.what());
347 }
348 });
349
350 m_pWebSocket->onError(
351 [this](const std::string& szError)
352 {
353
354 LOG_ERROR(logging::g_qSharedLogger, "WebRTC camera {} WebSocket Error: {}", m_szStreamerID, szError);
355 });
356
358
360
361 m_pPeerConnection->onLocalDescription(
362 [this](rtc::Description rtcDescription)
363 {
364 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Generated Local Description (Type: {}).", m_szStreamerID, rtcDescription.typeString());
365
366
367 if (rtcDescription.typeString() == "offer")
368 {
369 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Ignoring 'offer' type in onLocalDescription.", m_szStreamerID);
370 return;
371 }
372
373
374 nlohmann::json jsnConfigMessage;
375 jsnConfigMessage["type"] = "layerPreference";
376 jsnConfigMessage["spatialLayer"] = 0;
377 jsnConfigMessage["temporalLayer"] = 0;
378 jsnConfigMessage["playerId"] = "";
379 m_pWebSocket->send(jsnConfigMessage.dump());
380 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC Sent 'layerPreference'.");
381
382
383 nlohmann::json jsnMessage;
384 jsnMessage["type"] = rtcDescription.typeString();
385
386 jsnMessage["minBitrateBps"] = 0;
387 jsnMessage["maxBitrateBps"] = 0;
388
389 std::string szSDP = rtcDescription.generateSdp();
390
391 std::string szMungedSDP =
392 std::regex_replace(szSDP, std::regex("(a=fmtp:\\d+ level-asymmetry-allowed=.*)\r\n"), "$1;x-google-start-bitrate=10000;x-google-max-bitrate=100000\r\n");
393 jsnMessage["sdp"] = szMungedSDP;
394
395 m_pWebSocket->send(jsnMessage.dump());
396
397
398 LOG_INFO(logging::g_qSharedLogger, "WebRTC camera {} Sent Local Description to Server (Munged SDP).", m_szStreamerID);
399 });
400
401 m_pPeerConnection->onTrack(
402 [this](std::shared_ptr<rtc::Track> rtcTrack)
403 {
404
405 rtc::Description::Media rtcMediaDescription = rtcTrack->description();
406
407 std::string szMediaType = rtcMediaDescription.type();
408
409 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} onTrack triggered. Media Type: {}", m_szStreamerID, szMediaType);
410
411
412 if (szMediaType != "video")
413 {
414 LOG_DEBUG(logging::g_qSharedLogger, "WebRTC camera {} Ignoring non-video track.", m_szStreamerID);
415 return;
416 }
417
418
419 m_pVideoTrack1 = rtcTrack;
420
421
422 m_pTrack1H264DepacketizationHandler = std::make_shared<rtc::H264RtpDepacketizer>(rtc::NalUnit::Separator::LongStartSequence);
423 m_pTrack1RtcpReceivingSession = std::make_shared<rtc::RtcpReceivingSession>();
424 m_pTrack1H264DepacketizationHandler->addToChain(m_pTrack1RtcpReceivingSession);
425 m_pVideoTrack1->setMediaHandler(m_pTrack1H264DepacketizationHandler);
426
427 LOG_INFO(logging::g_qSharedLogger, "WebRTC camera {} Video Track Handler Configured. Waiting for frames...", m_szStreamerID);
428
429
430 m_pVideoTrack1->onFrame(
431 [this](rtc::binary rtcBinaryMessage, rtc::FrameInfo rtcFrameInfo)
432 {
433
434 if (rtcBinaryMessage.empty())
435 {
436 return;
437 }
438
439
440 std::vector<uint8_t> vH264EncodedBytes;
441
442 vH264EncodedBytes.reserve(rtcBinaryMessage.size() + 16 + AV_INPUT_BUFFER_PADDING_SIZE);
443
444 if (rtcFrameInfo.payloadType == 96)
445 {
446
447
448
449 const uint8_t* pData =
reinterpret_cast<const uint8_t*
>(rtcBinaryMessage.data());
450 vH264EncodedBytes.insert(vH264EncodedBytes.end(), pData, pData + rtcBinaryMessage.size());
451 }
452 else if (rtcFrameInfo.payloadType == 97)
453 {
454
455
456
457
458
459 if (rtcBinaryMessage.size() <= 2)
460 return;
461
462
463 vH264EncodedBytes.push_back(0);
464 vH264EncodedBytes.push_back(0);
465 vH264EncodedBytes.push_back(0);
466 vH264EncodedBytes.push_back(1);
467
468
469 const uint8_t* pData =
reinterpret_cast<const uint8_t*
>(rtcBinaryMessage.data());
470 vH264EncodedBytes.insert(vH264EncodedBytes.end(), pData + 2, pData + rtcBinaryMessage.size());
471 }
472 else
473 {
474
475 return;
476 }
477
478
479 vH264EncodedBytes.insert(vH264EncodedBytes.end(), AV_INPUT_BUFFER_PADDING_SIZE, 0);
480
481
482 std::unique_lock<std::shared_mutex> lkDecoderLock(m_muDecoderMutex);
484
485 if (bDecoded && m_fnOnFrameReceivedCallback)
486 {
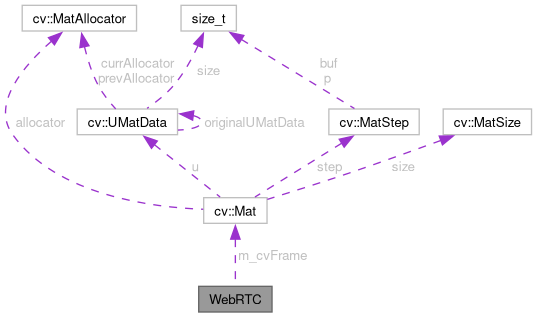
487 m_fnOnFrameReceivedCallback(m_cvFrame);
488 }
489 lkDecoderLock.unlock();
490 });
491 });
492
493 m_pPeerConnection->onGatheringStateChange(
494 [this](rtc::PeerConnection::GatheringState eGatheringState)
495 {
496
497 switch (eGatheringState)
498 {
499 case rtc::PeerConnection::GatheringState::Complete:
500 LOG_DEBUG(logging::g_qSharedLogger, "Camera {} PeerConnection ICE gathering state changed to: Complete", m_szStreamerID);
501 break;
502 case rtc::PeerConnection::GatheringState::InProgress:
503 LOG_DEBUG(logging::g_qSharedLogger, "Camera {} PeerConnection ICE gathering state changed to: InProgress", m_szStreamerID);
504 break;
505 case rtc::PeerConnection::GatheringState::New:
506 LOG_DEBUG(logging::g_qSharedLogger, "Camera {} PeerConnection ICE gathering state changed to: New", m_szStreamerID);
507 break;
508 default: LOG_DEBUG(logging::g_qSharedLogger, "Camera {} Peer connection ICE gathering state changed to: Unknown", m_szStreamerID); break;
509 }
510 });
511
512 m_pPeerConnection->onIceStateChange(
513 [this](rtc::PeerConnection::IceState eIceState)
514 {
515
516 switch (eIceState)
517 {
518 case rtc::PeerConnection::IceState::Checking:
519 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection ICE state changed to: Checking", m_szStreamerID);
520 break;
521 case rtc::PeerConnection::IceState::Closed:
522 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection ICE state changed to: Closed", m_szStreamerID);
523 break;
524 case rtc::PeerConnection::IceState::Completed:
525 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection ICE state changed to: Completed", m_szStreamerID);
526 break;
527 case rtc::PeerConnection::IceState::Connected:
528 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection ICE state changed to: Connected", m_szStreamerID);
529 break;
530 case rtc::PeerConnection::IceState::Disconnected:
531 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection ICE state changed to: Disconnected", m_szStreamerID);
532 break;
533 case rtc::PeerConnection::IceState::Failed:
534 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection ICE state changed to: Failed", m_szStreamerID);
535 break;
536 case rtc::PeerConnection::IceState::New: LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection ICE state changed to: New", m_szStreamerID); break;
537 default: LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection ICE state changed to: Unknown", m_szStreamerID); break;
538 }
539 });
540 m_pPeerConnection->onSignalingStateChange(
541 [this](rtc::PeerConnection::SignalingState eSignalingState)
542 {
543
544 switch (eSignalingState)
545 {
546 case rtc::PeerConnection::SignalingState::HaveLocalOffer:
547 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection signaling state changed to: HaveLocalOffer", m_szStreamerID);
548 break;
549 case rtc::PeerConnection::SignalingState::HaveLocalPranswer:
550 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection signaling state changed to: HaveLocalPranswer", m_szStreamerID);
551 break;
552 case rtc::PeerConnection::SignalingState::HaveRemoteOffer:
553 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection signaling state changed to: HaveRemoteOffer", m_szStreamerID);
554 break;
555 case rtc::PeerConnection::SignalingState::HaveRemotePranswer:
556 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection signaling state changed to: HaveRemotePrAnswer", m_szStreamerID);
557 break;
558 case rtc::PeerConnection::SignalingState::Stable:
559 LOG_INFO(logging::g_qSharedLogger, "Camera {} PeerConnection signaling state changed to: Stable", m_szStreamerID);
560 break;
561 default: LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection signaling state changed to: Unknown", m_szStreamerID); break;
562 }
563 });
564
565 m_pPeerConnection->onStateChange(
566 [this](rtc::PeerConnection::State eState)
567 {
568
569 switch (eState)
570 {
571 case rtc::PeerConnection::State::Closed: LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection state changed to: Closed", m_szStreamerID); break;
572 case rtc::PeerConnection::State::Connected:
573 LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection state changed to: Connected", m_szStreamerID);
574 break;
575 case rtc::PeerConnection::State::Connecting:
576 LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection state changed to: Connecting", m_szStreamerID);
577 break;
578 case rtc::PeerConnection::State::Disconnected:
579 LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection state changed to: Disconnected", m_szStreamerID);
580 break;
581 case rtc::PeerConnection::State::Failed: LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection state changed to: Failed", m_szStreamerID); break;
582 case rtc::PeerConnection::State::New: LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection state changed to: New", m_szStreamerID); break;
583 default: LOG_INFO(logging::g_qSharedLogger, "Camera {} Peer connection state changed to: Unknown", m_szStreamerID); break;
584 }
585 });
586
588
590
591 m_pDataChannel->onOpen(
592 [this]()
593 {
594
595 LOG_INFO(logging::g_qSharedLogger, "Camera {} WebRTC Data channel OPENED.", m_szStreamerID);
596
597
598 m_pDataChannel->send(std::string(1, static_cast<char>(1)));
599
600
601
602
603 LOG_INFO(logging::g_qSharedLogger, "Camera {} WebRTC Sending Encoder Configuration to Simulator...", m_szStreamerID);
604
605
607
608
611
612
615
616
618 });
619
620 m_pDataChannel->onMessage(
621 [this](std::variant<rtc::binary, rtc::string> rtcMessage)
622 {
623 try
624 {
625
626 nlohmann::json jsnMessage;
627
628
629 if (std::holds_alternative<rtc::string>(rtcMessage))
630 {
631
632 std::string szMessage = std::get<rtc::string>(rtcMessage);
633
634
635 jsnMessage = nlohmann::json::parse(szMessage);
636 LOG_DEBUG(logging::g_qSharedLogger, "Camera {} DATA_CHANNEL Received message from peer: {}", m_szStreamerID, szMessage);
637 }
638 else if (std::holds_alternative<rtc::binary>(rtcMessage))
639 {
640
641 rtc::binary rtcBinaryData = std::get<rtc::binary>(rtcMessage);
642
643
644 std::string szBinaryDataStr;
645 for (auto byte : rtcBinaryData)
646 {
647 if (std::isprint(static_cast<unsigned char>(byte)))
648 {
649 szBinaryDataStr += static_cast<char>(byte);
650 }
651 }
652
653
654 LOG_DEBUG(logging::g_qSharedLogger,
655 "Camera {} DATA_CHANNEL Received binary data ({} bytes): {}",
656 m_szStreamerID,
657 rtcBinaryData.size(),
658 szBinaryDataStr);
659 }
660 else
661 {
662 LOG_ERROR(logging::g_qSharedLogger, "Camera {} Received unknown message type from peer", m_szStreamerID);
663 }
664 }
665 catch (const std::exception& e)
666 {
667
668 LOG_ERROR(logging::g_qSharedLogger, "Camera {} Error occurred while negotiating with the datachannel: {}", m_szStreamerID, e.what());
669 }
670 });
671
672 return true;
673}
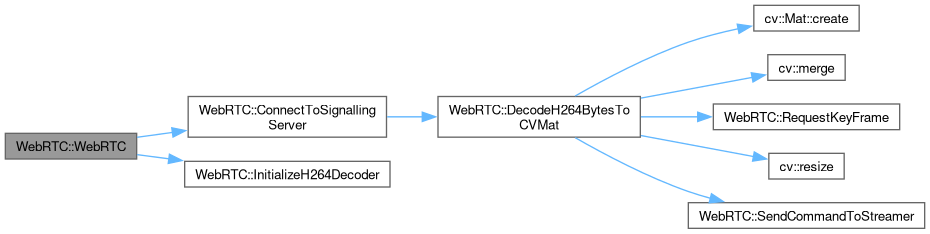
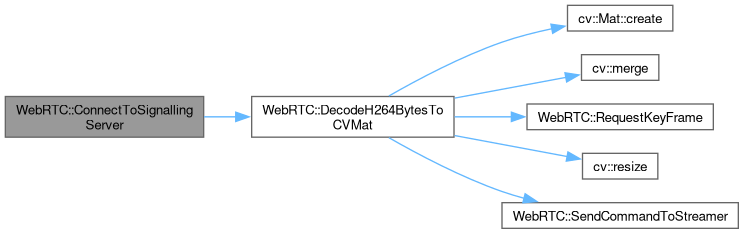
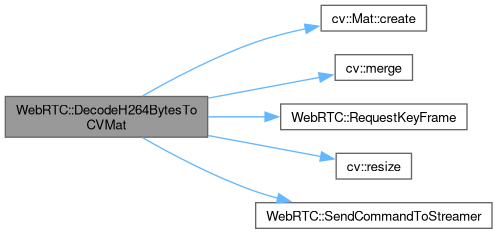
bool SendCommandToStreamer(const std::string &szCommand)
This method sends a command to the streamer via the data channel. The command is a JSON string that i...
Definition WebRTC.cpp:898
bool DecodeH264BytesToCVMat(const std::vector< uint8_t > &vH264EncodedBytes, cv::Mat &cvDecodedFrame, const AVPixelFormat eOutputPixelFormat)
Decodes H264 encoded bytes to a cv::Mat using FFmpeg.
Definition WebRTC.cpp:746