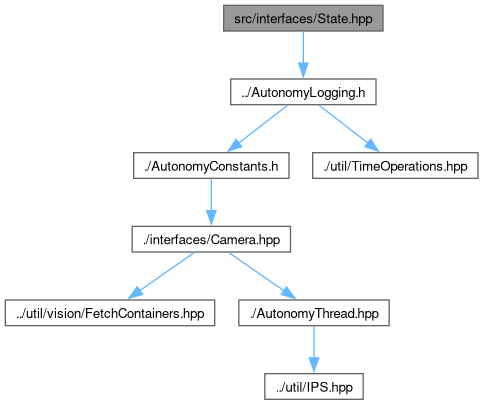
Abstract State Implementation for Autonomy State Machine.
More...
Go to the source code of this file.
|
| namespace | statemachine |
| | Namespace containing all state machine related classes.
|
| |
|
| enum class | statemachine::States {
eIdle
, eNavigating
, eSearchPattern
, eApproachingMarker
,
eApproachingObject
, eVerifyingPosition
, eVerifyingMarker
, eVerifyingObject
,
eReversing
, eStuck
, NUM_STATES
} |
| | The states that the state machine can be in. More...
|
| |
| enum class | statemachine::Event {
eStart
, eReachedGpsCoordinate
, eReachedMarker
, eReachedObject
,
eMarkerSeen
, eObjectSeen
, eMarkerUnseen
, eObjectUnseen
,
eVerifyingComplete
, eVerifyingFailed
, eAbort
, eRestart
,
eNoWaypoint
, eNewWaypoint
, eReverse
, eReverseComplete
,
eSearchFailed
, eStuck
, eUnstuck
, NUM_EVENTS
} |
| | The events that can be triggered in the state machine. More...
|
| |
Abstract State Implementation for Autonomy State Machine.
- Author
- Eli Byrd (edbgk.nosp@m.k@ms.nosp@m.t.edu)
- Date
- 2024-01-15
- Copyright
- Copyright Mars Rover Design Team 2024 - All Rights Reserved