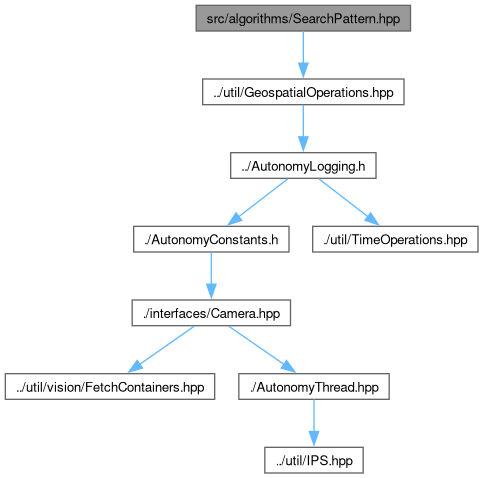
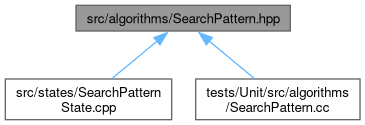
Defines and implements namespaces and functions for algorithms that pertain to search pattern.
More...
Go to the source code of this file.
|
| namespace | searchpattern |
| | Namespace containing algorithms related to calculating drive powers, odometry, trajectories, kinematics, etc of search pattern.
|
| |
|
| std::vector< geoops::Waypoint > | searchpattern::CalculateSpiralPatternWaypoints (const geoops::Waypoint &stStartingPoint, const double dAngularStepDegrees=57, const double dMaxRadius=25, const double dStartingHeadingDegrees=0, const double dStartSpacing=1) |
| | Perform a spiral search pattern starting from a given point.
|
| |
| std::vector< geoops::Waypoint > | searchpattern::CalculateZigZagPatternWaypoints (const geoops::Waypoint &stCenterPoint, const double dWidth=20.0, const double dHeight=20.0, const double dSpacing=1.0, const bool bVertical=true) |
| | Calculate waypoints for a zigzag pattern. This function generates waypoints for a zigzag pattern starting from a given point with configurable width, height, and spacing. The direction of the zigzag pattern (vertical or horizontal) can be specified.
|
| |
| std::vector< geoops::Waypoint > | searchpattern::CalculateSnakeSearchPattern (const geoops::Waypoint &stStartCoord, const double dWidth=20.0, const double dHeight=20.0, const double dSpacing=1.0, const int nNumberOfSlithers=1.0, const bool bVertical=true) |
| | Calculate waypoints for a snake search pattern.
|
| |
Defines and implements namespaces and functions for algorithms that pertain to search pattern.
- Author
- Jacob V (jpvf2.nosp@m.d@um.nosp@m.syste.nosp@m.m.ed.nosp@m.u)
- Date
- 2023-09-21
- Copyright
- Copyright Mars Rover Design Team 2023 - All Rights Reserved