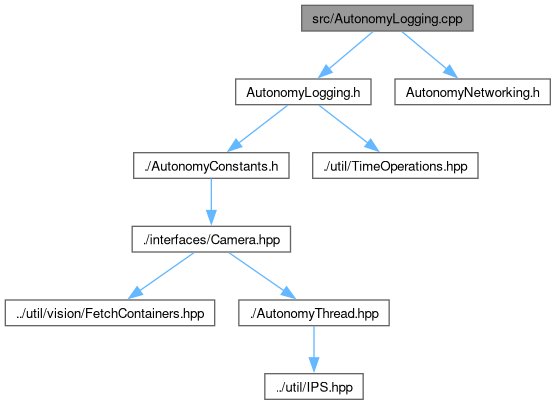
Sets up functions and classes used by logging project wide.
More...
|
| namespace | logging |
| | Namespace containing all global type/structs that will be used project wide for logging.
|
| |
|
| void | logging::InitializeLoggers (std::string szLoggingOutputPath, std::string szProgramTimeLogsDir) |
| | Logger Initializer - Sets Up all the logging handlers required for having the above loggers.
|
| |
|
|
quill::Logger * | logging::g_qFileLogger |
| |
|
quill::Logger * | logging::g_qConsoleLogger |
| |
|
quill::Logger * | logging::g_qRoveCommLogger |
| |
|
quill::Logger * | logging::g_qSharedLogger |
| |
|
quill::LogLevel | logging::g_eConsoleLogLevel |
| |
|
quill::LogLevel | logging::g_eFileLogLevel |
| |
|
quill::LogLevel | logging::g_eRoveCommLogLevel |
| |
|
std::string | logging::g_szProgramStartTimeString |
| |
|
std::string | logging::g_szLoggingOutputPath |
| |
Sets up functions and classes used by logging project wide.
- Author
- Eli Byrd (edbgk.nosp@m.k@ms.nosp@m.t.edu), ClayJay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2023-10-18
- Copyright
- Copyright Mars Rover Design Team 2023 - All Rights Reserved