|
| class | logging::LoggingFilter |
| | This class serves as a container class for handling log filtering of loggers. This must be used if you want each handler to have a different logging level since adding multiple handlers to the same logger will apply the loggers logging level to each handler. More...
|
| |
| class | logging::MRDTConsoleSink |
| | A custom console sink for logging messages with specific formatting and timestamping. This class extends quill::ConsoleSink and provides the capability to format log messages using a specified pattern and time format, allowing for customizable and colorized console outputs. More...
|
| |
| class | logging::MRDTRotatingFileSink |
| | A custom rotating file sink that formats and logs messages to a file with automatic rotation based on file size or time interval. This class extends quill::RotatingFileSink and provides the ability to format log messages using a pattern and time format, ensuring that logs are written to a rotating file system. More...
|
| |
| class | logging::MRDTRoveCommSink |
| | A custom logger sink designed to send formatted log messages over the RoveComm protocol. This class extends quill::Sink and is tailored for use in the Autonomy system, where log messages need to be transmitted as packets over a network to a BaseStation via UDP. More...
|
| |
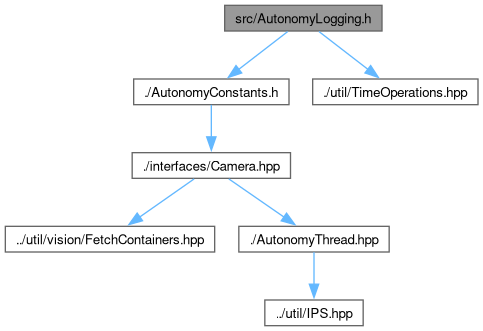
Implements Logging for Autonomy.
Note: Functions and Variables are defined in AutonomyGlobals.cpp
by having the declarations occur in a separate header we are
more easily able to use the functionality of the logger in
areas of the program that would normally be unaccessible
due to it being included in the Main Globals Header.
- Author
- Eli Byrd (edbgk.nosp@m.k@ms.nosp@m.t.edu)
- Date
- 2023-08-22
- Copyright
- Copyright Mars Rover Design Team 2023 - All Rights Reserved